Análise de vibrações do desequilíbrio
1 – Análise de vibrações de desequilíbrio – Introdução
A análise de vibrações do desequilíbrio de uma máquina é um importante preliminar ao passo seguinte que é o da equilibragem do seu rotor. Esta ação pode ser efetuada sob a forma de equilibragem no local, com um analisador de vibrações, ou em banco. O desequilíbrio do rotor é um dos defeitos mais comuns a gerar vibrações excessivas nas máquinas. Assim quem quer compreender o comportamento dinâmico de um equipamento em funcionamento tem de dispor uma compreensão razoavelmente completa deste fenómeno. Isto é essencial para implementar com sucesso um programa de manutenção preditiva.
A seguir pretende dar-se uma panorâmica geral dos diferentes aspetos relacionados com esta anomalia.
2 – Desequilíbrio e espectro de frequência
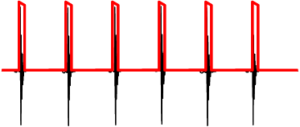
Talvez o primeiro facto que quem aborda a interpretação do Espectro de Frequência toma conhecimento consiste em que o desequilíbrio se manifesta no Espectro sob a forma de uma componente à velocidade de rotação conforme se pode ver na Figura 1.
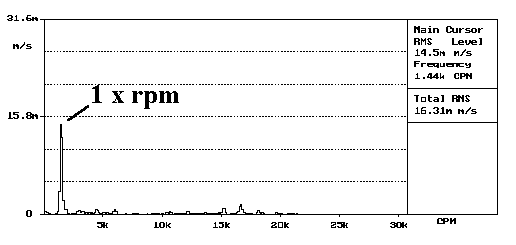
Figura 1 – O desequilíbrio manifesta-se no espectro sob a forma de uma componente elevada à frequência da velocidade de rotação, na análise de vibrações do desequilíbrio.
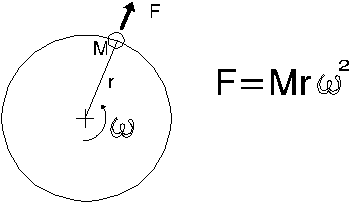
Este facto é facilmente compreensível caso se considerar que uma massa desequilibrada gera durante o funcionamento da máquina uma força centrífuga.
3 – Tipos de desequilíbrio e forma de vibração
De acordo com a ISO 21940 existem basicamente o Desequilíbrio Estático e o Desequilíbrio de Momento que se podem combinar para gerar um Desequilíbrio Dinâmico, conforme se pode ver na Figura 3.
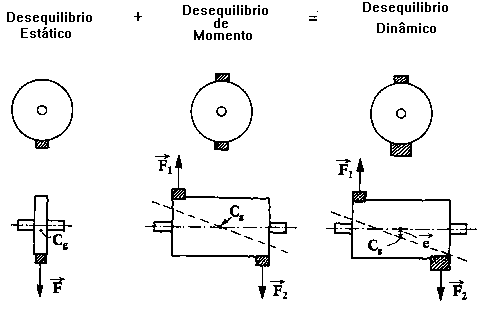
Em fase no caso de um desequilíbrio estático, e em oposição de fase no caso de um desequilíbrio de momento. No caso do desequilíbrio dinâmico terão um movimento intermédio.
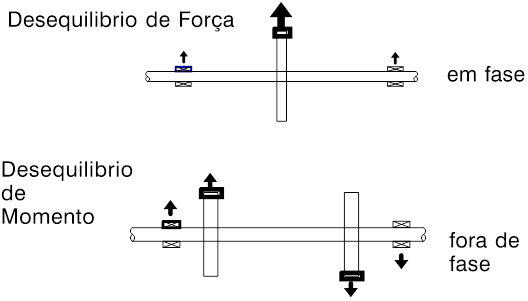
A seguir pode-se ver o efeito do tipo de desequilíbrio na fase das vibrações.
Outro fator relevante no modo da máquina vibrar é a rigidez das suas chumaceiras. Como é natural a máquina vibrará mais na direção em que é menos rígida.
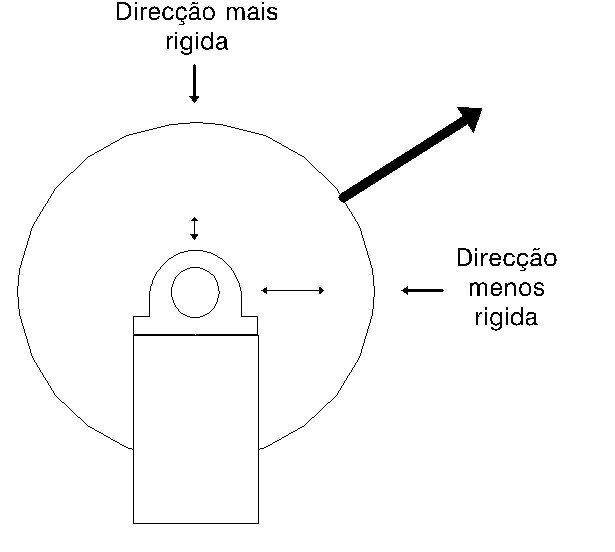
É por esta razão que a maioria das máquinas de veio horizontal vibra mais nesta direção. Efetivamente nas máquinas com esta disposição as chumaceiras são normalmente menos rígidas na horizontal.
Outro fator com que também têm de se entrar em conta é com a simetria ou assimetria do rotor. No caso de um rotor simétrico a força centrífuga gerada será distribuída de igual modo pelas chumaceiras, devendo, portanto, existir uma simetria de vibrações, enquanto no caso de um rotor assimétrico a chumaceira mais carregada pelo desequilíbrio deverá vibrar mais.
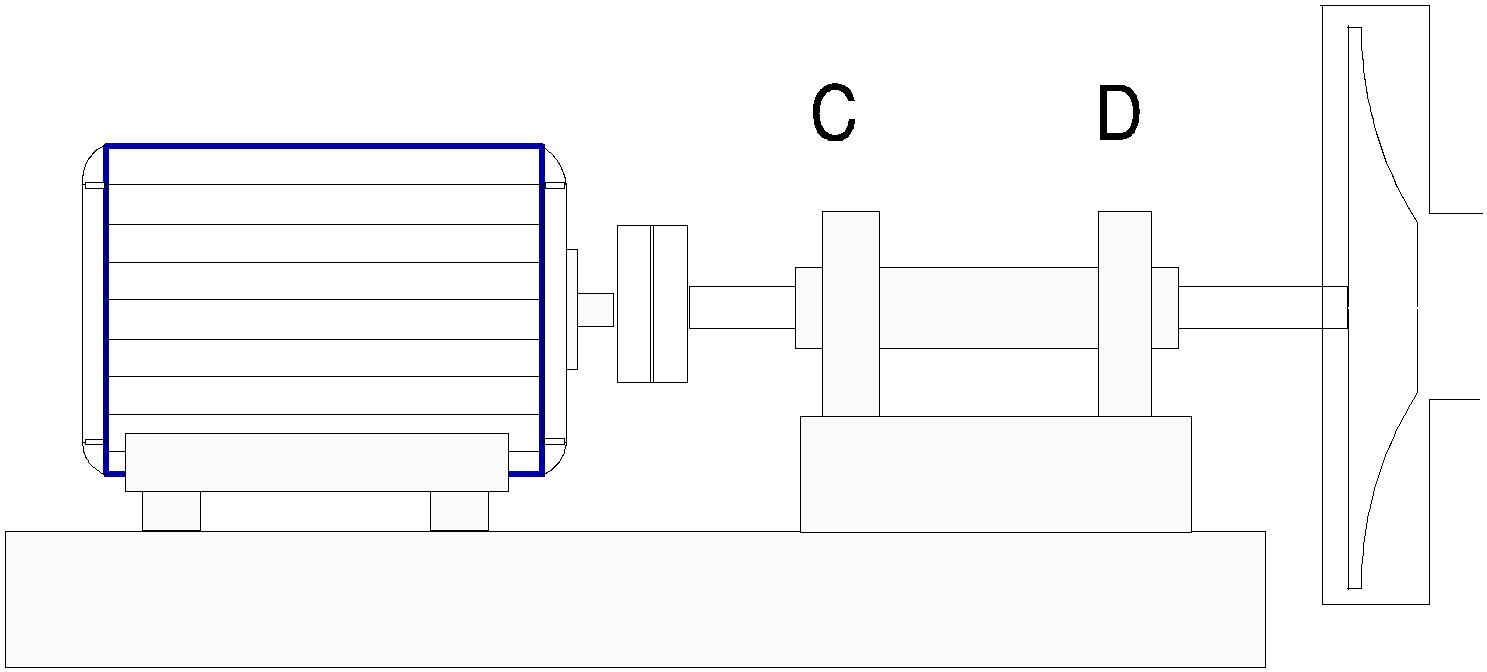
Considere-se por exemplo os resultados das medições do Nível Global de Vibrações, efetuadas com um medidor de vibrações numa bomba com desequilíbrio no acoplamento.
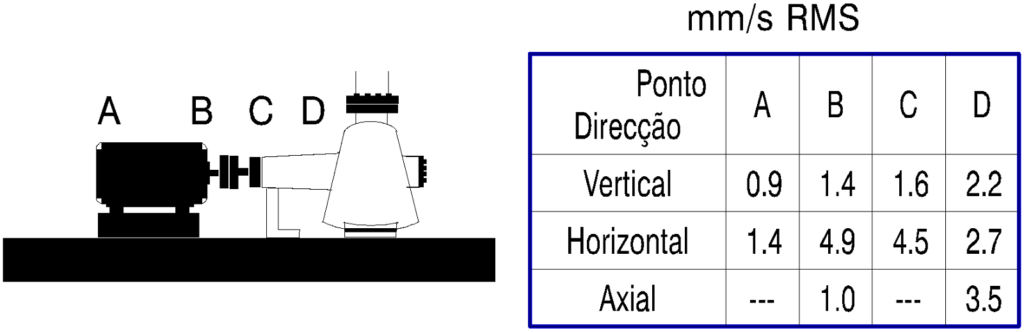
Repare-se que as vibrações são maiores nas chumaceiras de ambos os lados do acoplamento devido ao facto de aí se localizarem as chumaceiras mais carregadas pelo desequilíbrio.
Repare-se também que as vibrações são maiores na direção horizontal por ser a direção em que as chumaceiras apresentam menor rigidez.
4 – As vibrações na direção axial
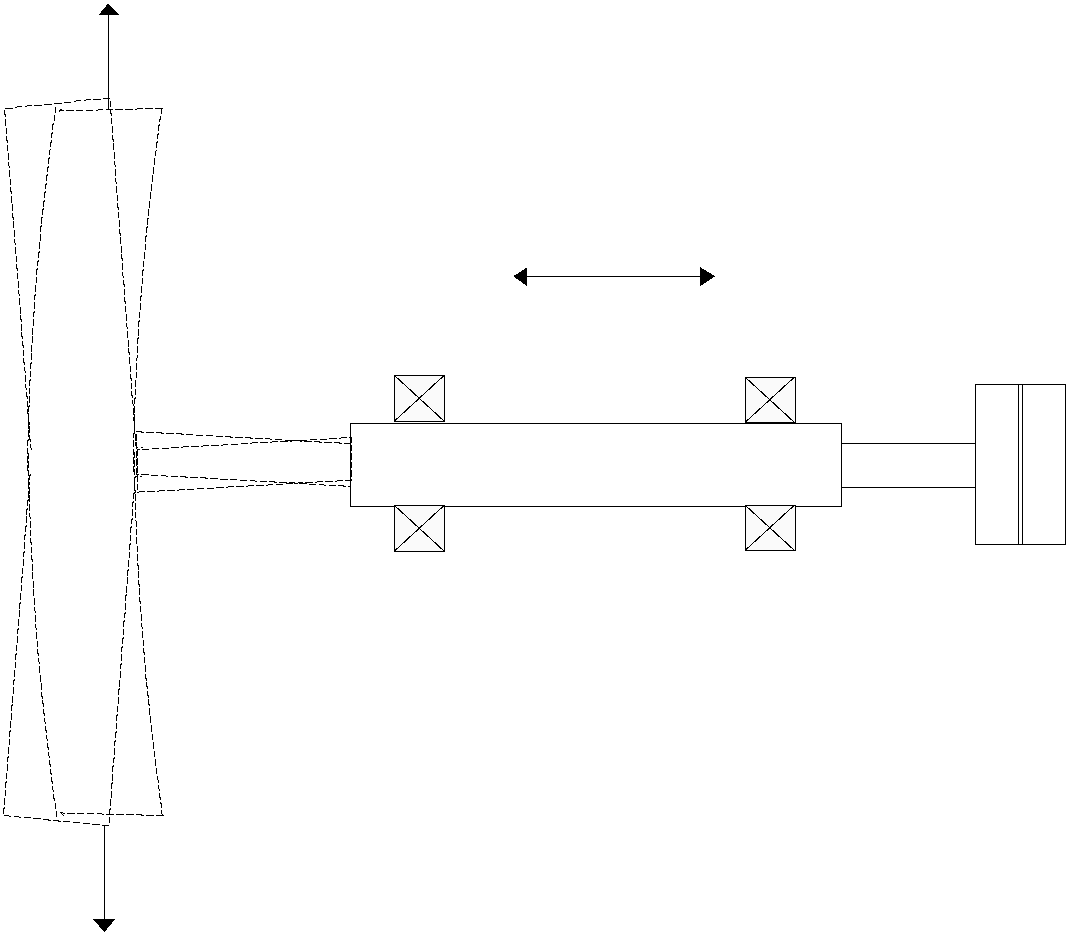
Um comportamento particular é o dos rotores em consola. Um desequilíbrio neste tipo de rotores gera vibrações axiais.
Na tabela a seguir apresentado podem-se ver os níveis de vibrações antes e depois da equilibragem de um rotor em consola (.mm/s RMS)
Tabela – Níveis de vibrações antes e depois da equilibragem de um rotor em consola
(mm/s RMS)
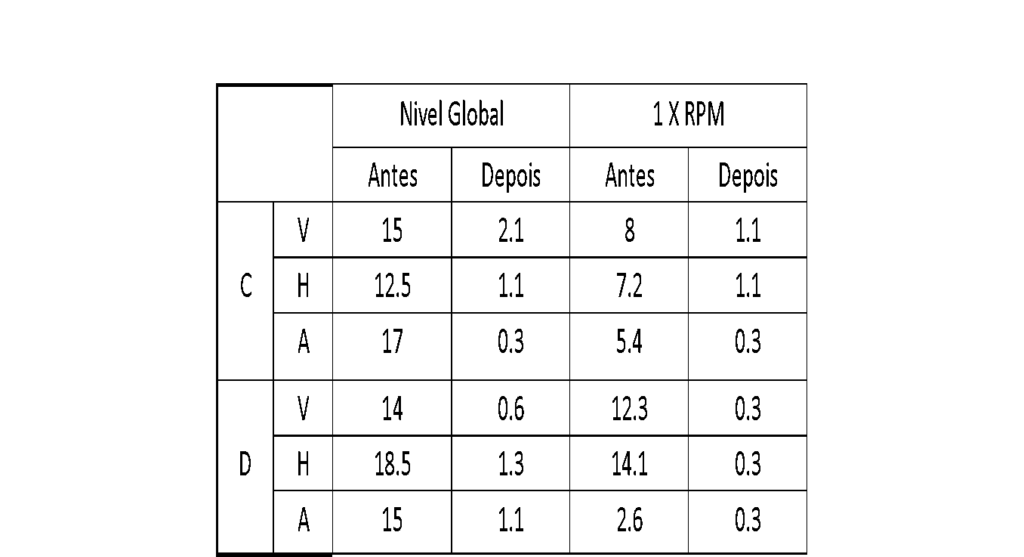
Note-se os elevados níveis de vibrações iniciais na direção axial que desaparecem, paralelamente ao que acontece nas direções radiais, após a equilibragem.
A seguir pode-se ver uma demonstração do efeito de um desequilíbrio, nas vibrações axiais de um rotor em consola.
5 – Análise de vibrações do desequilíbrio e fase das vibrações
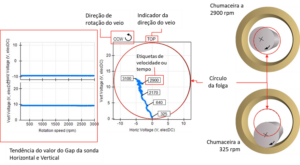
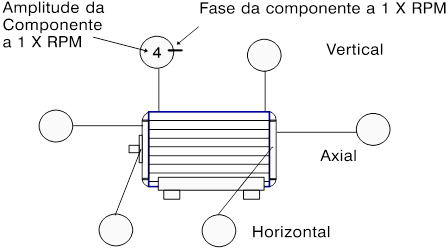
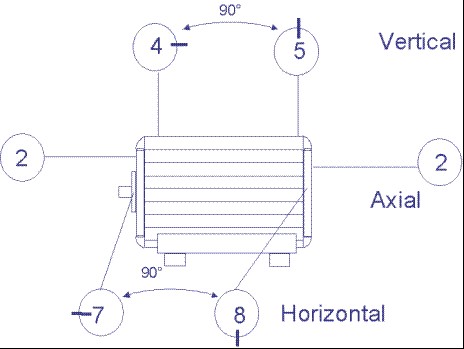
Quando se mede a fase das vibrações (mais propriamente a fase da componente à velocidade de rotação) existe uma convenção que permite reunir num só esquema toda a informação (1). Dentro dos círculos que se podem ver na Figura 10 o número representa a amplitude da componente à velocidade de rotação. O traço no círculo representa a sua fase, com origem no ponto superior do círculo e contada no sentido dos ponteiros do relógio. Para cada ponto de medida existe um círculo com a informação relativa à amplitude e fase das vibrações.
No que respeita à fase, um sintoma de desequilíbrio consiste na diferença em fase entre dois pontos de medida numa direção ser igual à diferença na outra. Efetivamente caso se imagine um desequilíbrio como um momento a rodar dentro da máquina é compreensível que as diferenças em fase, entre medidas efetuadas, na mesma direção, em duas chumaceiras de uma máquina, sejam iguais independentemente da direção em que as medidas são efetuadas.
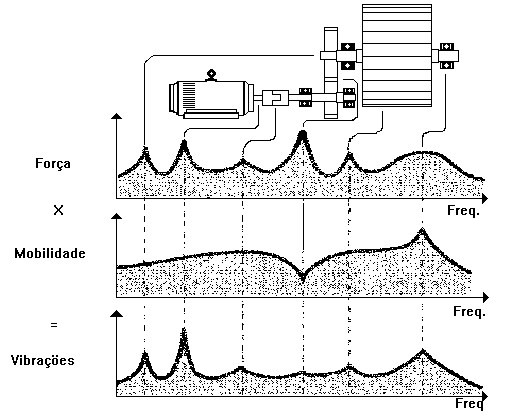
Isto nem sempre se verifica pelo facto da mobilidade das chumaceiras (razão entre a resposta de uma estrutura e a força que a excita) influenciar não só a amplitude das vibrações (sobretudo nas ressonâncias) como também a fase, e ser diferente em direções diferentes.
O facto de a mobilidade influenciar a fase impede que se conheça de imediato a posição da massa desequilibrante quando aquela é medida.
6 – Análise de vibrações do desequilíbrio e repetibilidade das medidas
Repetibilidade das medidas
Caso não exista repetibilidade em amplitude e fase nas medidas efetuadas entre arranques consecutivos de uma máquina, sem não existir uma causa evidente para isso, é natural que existam massas no rotor que assumem posições diferentes de arranque para arranque. Normalmente isto ocorre devido a massas soltas. Nestas condições não se poderá proceder à equilibragem.
Desequilíbrio a quente
Um caso mais frequente ocorre com rotores a trabalhar a quente. A frio estão devidamente equilibrados e, portanto, não geram vibrações; a quente empenam surge uma excentricidade da massa e gera-se um desequilíbrio.
Desequilíbrio devido a arranque incorreto
Em máquinas de grandes dimensões (Megawats) com patamares de estabilização de temperatura durante o arranque, a condição de desequilíbrio final, com a máquina em funcionamento, pode depender do procedimento de arranque seguido. Conforme o procedimento for mais ao menos adequado assim a máquina ficará com mais ou menos vibrações em funcionamento, dependendo do empeno final do rotor ser maior ou menor.
7 – Alguns erros fáceis de cometer
Quando se procede a Acão de equilibragem de um rotor existem dois erros que podem ocorrer aos menos avisados:
– Não entrar em conta com as chavetas
– No caso de rotores equilibrados por partes não ter cuidado com tolerâncias de montagem
A Chaveta
Caso não se tome nenhuma precaução aquando da equilibragem de um veio, esta é efetuada sem a ranhura onde vai ser colocada a chaveta estar preenchida. Quando a chaveta for montada no veio pode gerar um desequilíbrio fora das tolerâncias.
A ISO 21940 contem convenções sobre este especto. Dá nomeadamente algumas sugestões para a realização de meias chavetas para acompanhar o veio na equilibragem.
Tolerâncias de Montagem
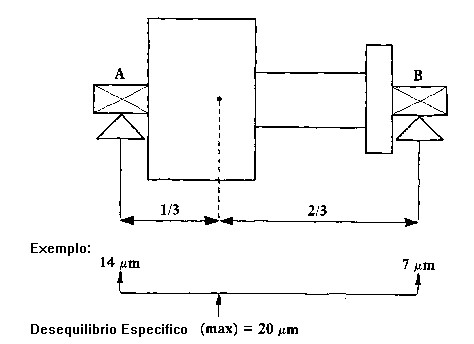
No ábaco a seguir apresentado, retirado da ISO 21940-3, podem ver-se as tolerâncias de equilibragem em função da velocidade de rotação da máquina e da Classe de Equilibragem. Esta tolerância é expressa em g.mm/Kg ou μ. Esta distância expressa em microns representa a distância entre o eixo de rotação e o eixo de inércia.
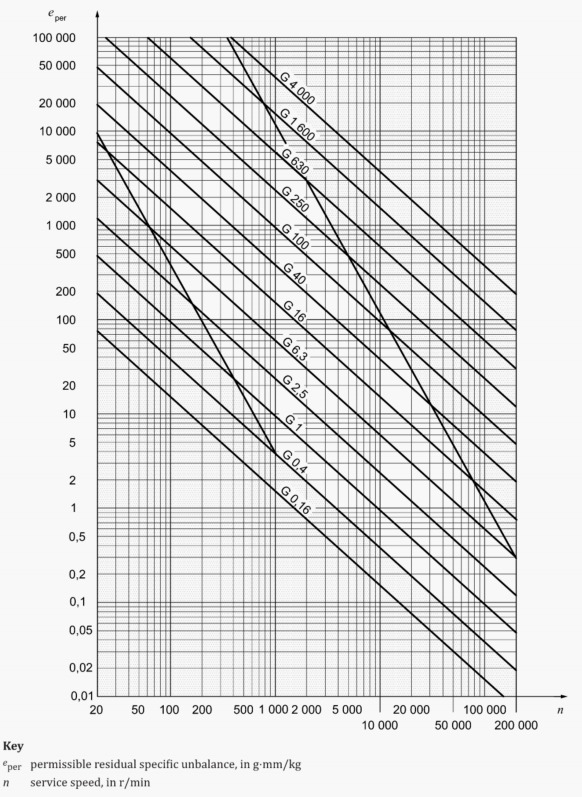
Tome-se por exemplo o caso de um rotor a rodar a 3000 RPM, para ser equilibrado ao Grau 6.3. A tolerância de equilibragem é de 20μ. Daqui pode-se imediatamente retirar que uma montagem que não respeite esta tolerância degradará a qualidade de equilibragem de um rotor, para valores fora das tolerâncias.
Daqui a regra de, sempre que possível, os rotores serem equilibrados completos.
Caso isto não seja efetivamente possível há que jogar com a posição dos desequilíbrios residuais das diversas partes, e montá-los uns em oposição aos outros. Há também que ter extremo cuidado com as folgas de montagem entre as diversas partes.
8 – Rotores flexíveis
Os rotores a funcionar acima da sua primeira frequência natural deformam-se e têm um comportamento designado por flexível.

Um rotor a funcionar nestas condições tem de ser equilibrado à sua velocidade de rotação, contrariamente aos rotores rígidos (rotor a funcionar abaixo da sua primeira frequência natural), que efetivamente são os mais comuns.
9 – Resumo dos sintomas em análise de vibrações do desequilíbrio
A seguir apresenta-se um quadro com um resumo dos principais sintomas de desequilíbrio.
| Espectro de Frequência | Grande componente à velocidade de rotação |
| Direção predominante | Radiais. Também axiais nos rotores em consola |
| Direção – proporção relativa | Maior na direção de maior flexibilidade |
| Fase | Diferença numa direção igual à na outra |
| Local | Chumaceira mais carregada pelo desequilíbrio |
Referências
1 – Practical Solutions to Machinery and Maintenance Vibration Problems – UPDATE International Inc.
2 – ISO 21940 – Mechanical vibration – Rotor balancing