Turbomáquinas e órbitas
O assunto tratado neste artigo consiste em turbomáquinas e órbitas.
Este artigo pertence a uma série, que constitui o material de suporte do curso de análise de vibrações em turbomáquinas. As ligações para os outros artigos podem ser encontradas aqui.
1 Turbomáquinas e órbitas – construção da Órbita
A órbita combina os dados presentes nas formas de onda de um par de sensores de proximidade, desfasados de 90º, numa chumaceira. Deste modo cria um gráfico que exibe o movimento do centro do veio, a duas dimensões. Na órbita da figura os sensores estão colocados a 0° e 90°.
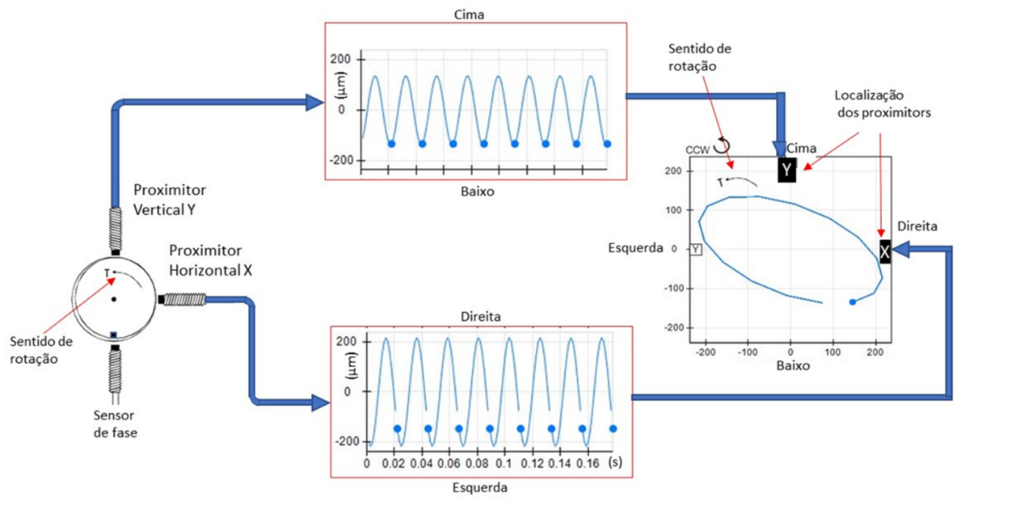
Figura – Órbita resultante do par de sensores de deslocamento XY
Na órbita, um ponto define-se por um par de valores X e Y, que se obtém através da informação contida nos sinais no tempo.
O centro do gráfico é definido pela média de valores X e valores Y das duas formas de onda.
Um impulso emitido pelo sensor de fase atua como referência: o ponto a negro mostra a localização do centro do veio quando este impulso ocorre.
Para completar o gráfico, a localização dos sensores e o sentido de rotação do veio estão presentes na figura anterior.
Sentido de rotação
Note-se que o sentido de rotação do veio não pode ser determinado a partir da órbita sem informação adicional. A melhor maneira de determinar o sentido de rotação é examinando a máquina. Outra opção é utilizando órbitas em rotação lenta, as quais atuam no sentido do movimento de precessão.
Assim, sabendo que a máquina está em rotação lenta, permite determinar o sentido de rotação observando o sentido de precessão.
O sentido de precessão é determinado também pela sequência espaço/circulo azul da órbita da figura.
A seguir pode ver um vídeo sobre este tema.
A marca do sensor de fase
A marca do sensor de fase é o círculo azul nas formas de onda e na órbita. Por exemplo, pode-se ver que o máximo da forma de onda do sensor vertical, vem 180 graus depois da marca do sensor de fase, do círculo azul.
O ponto em que o veio está mais próximo do sensor
Na figura anterior, representa-se um ciclo de vibração no gráfico da órbita. O pico positivo do sinal no tempo representa sempre a maior aproximação do veio ao sensor associado. Pelo contrário o pico negativo significa o maior afastamento
Convenções de orientação de montagem dos sensores
Existem diversas convenções para inserir a orientação do sensor: EU, Math, US e Vibration Institute.
Estas convenções permitem que as mesmas informações do ângulo de montagem do sensor sejam inseridas, pois cada convenção especifica a orientação física absoluta do sensor em graus (°) ou radianos em relação ao ponto de referência fixo da máquina. Isto permite que as orientações individuais do sensor sejam conhecidas e a relação (ângulo de orientação) entre diferentes sensores para serem apresentadas. Isto é particularmente importante para qualquer medição de dois canais, onde os sensores são montados a 90° um do outro.
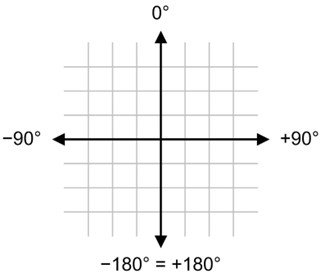
Orientação do sensor – UE
De acordo com a convenção da UE (ou Vibrocam), 0° corresponde a 12 horas (TDC). Outros ângulos são medidos em relação a este ângulo usando um componente de direção (“-” negativo ou “+” positivo).
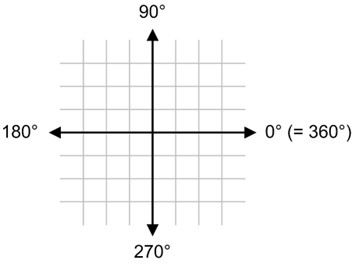
Orientação do sensor – Matemática
De acordo com a convenção Math (para matemática), é usado um sistema de coordenadas cartesianas, onde 0° corresponde a 3 horas. Os outros ângulos são medidos em relação a este ângulo no sentido anti-horário
Orientação do sensor – EUA
De acordo com a convenção dos EUA (ou Bently Nevada™), 0° corresponde a 12 horas (TDC, ponto morto superior). Outros ângulos são medidos em relação a este ângulo usando um componente de direção (“L” esquerda ou “R” direita).

Orientação segundo a convenção do Vibration Institute
O sensor horizontal está sempre 90º para a direita do sensor vertical, quando se olha do lado do acionamento da máquina (convenção Vibration Institute). De notar que a vibração horizontal precede a vertical por 90º, para uma rotação do veio, no sentido contrário aos ponteiros do relógio.
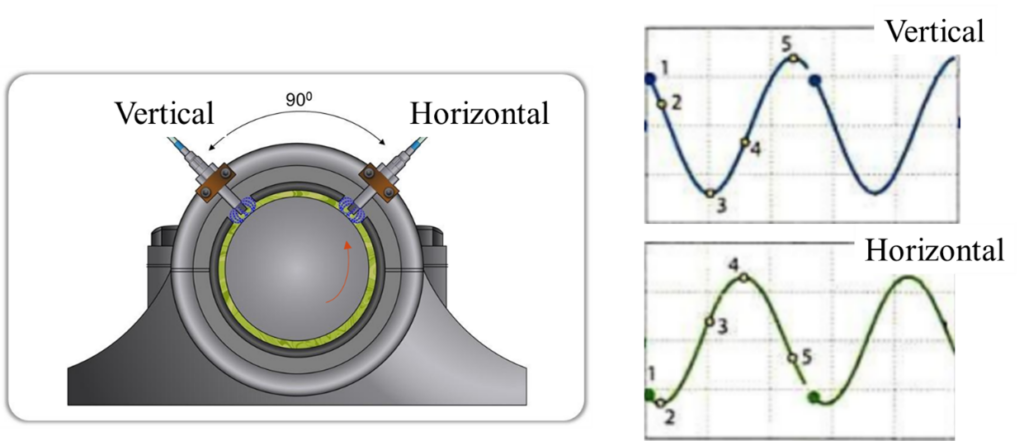
Figura – Convenção para medição de sonda de proximidade. O sensor horizontal está sempre 90º para a direita, do sensor vertical, quando se olha do lado do acionamento da máquina
As localizações dos sensores são indicadas nas extremidades dos gráficos, o que fornece uma referência visual uniforme, independentemente da orientação de montagem dos sensores.
2 Turbomáquinas e órbitas – Órbitas filtradas e não filtradas
As órbitas filtradas não são construídas diretamente a partir da informação do par de formas de onda. O sinal do tempo recolhido pelos sensores é filtrado a determinada frequência e posteriormente utilizado para a construção da órbita filtrada.
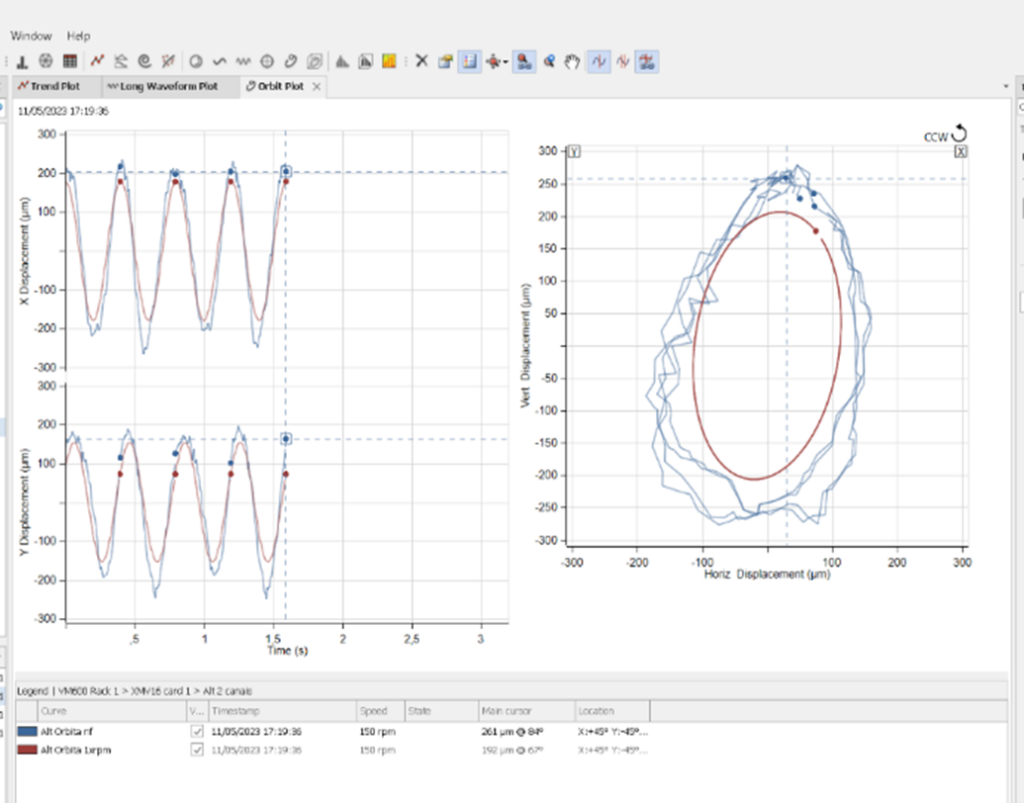
Figura – Órbitas filtradas (vermelho) e não filtradas (azul)
3 O referencial de fase e de velocidade de rotação – Sensor de fase (keyphasor)
A sequência espaço/ponto da órbita representa o efeito do impulso do sensor de fase. Este impulso representa um acontecimento no tempo que ocorre uma vez por rotação do veio. O sinal provém de um sensor de proximidade particular que é colocado radialmente em posição axial diferente.
O impulso do sensor de fase permite indicar a localização do centro do veio no instante em que, o entalhe produzido no veio para o efeito, passa por este sensordurante a rotação. A sequência espaço/ponto indica a direção de incremento de tempo.
Em órbitas filtradas a nX a velocidade rotação, em que n se trata de um número inteiro, serão inseridos no gráfico sucessivos pontos sensor de fase, que se sobreporão uns aos outros. O ponto do sensor de fase adiciona informação que é útil para determinar o sentido instantâneo do movimento do veio e para estimar a fase absoluta, a frequência de vibração em ordens da velocidade de rotação e, por último, o modo de vibração do rotor.
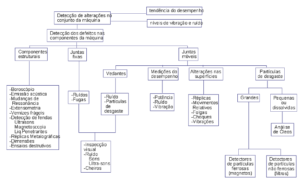
4 Turbomáquinas e órbitas – Informação presente nas Órbitas
A órbita, especialmente se dotada de sensor de fase, pode ser utilizada para medir a amplitude pico-a-pico em qualquer direção radial, a frequência relativa da vibração ou o sentido de precessão.
O perfil da órbita pode fornecer pistas importantes sobre o comportamento das máquinas, realçar alterações na resposta que seriam impercetíveis tradicionalmente, e ajudar a identificar a localização onde o problema pode ocorrer relativamente à posição dos componentes da máquina. A órbita exibe o percurso do veio relativamente à posição média, não existindo informação acerca de qual a posição média do veio. Para obter a posição média do veio, existem outros tipos de gráficos.
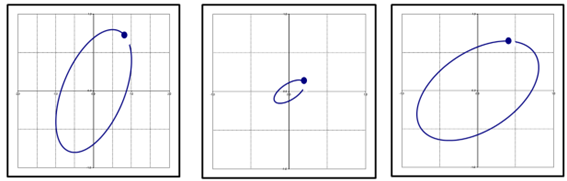
Podem-se criar gráficos de órbitas a partir da mesma localização e a velocidades diferentes (dados transientes), para mostrar a evolução da vibração dos veios com o aumento da velocidade.

Figura – Corbit – A órbita a diversas velocidades de rotação podendo-se ver o aumento do nível de vibrações co o aumento de velocidade
No video a seguir apresentado pode-se ver a evolução da órbita filtrada, durante o ensaio de uma turbomáquina.
Vídeo
Por outro lado, as órbitas podem ser criadas a partir de localizações axiais diferentes e à mesma velocidade, para exibir o modo de vibração do veio.
5 – Turbomáquinas e órbitas – A medição pico-pico na órbita
Uma medição que se pode realizar numa órbita é a amplitude pico-a-pico.
Existem dois aspetos fundamentais quando se utiliza esta medição.
- Primeiro, a medição pico-a-pico necessita de ser feita paralelamente ao eixo de medida do sensor. Medir simplesmente na vertical ou horizontal, neste caso, produziria resultados diferentes e incorretos.
- Segundo, a medição pico-a-pico é feita entre as tangentes que também são perpendiculares ao eixo de medida do sensor.
As grandezas primárias de interesse, nas medições da vibração num veio, são as variáveis que descrevem a forma da órbita. Considere-se a órbita do veio mostrada na figura a seguir, assumindo que existem dois transdutores A e B, montados a 90º entre si, que são usados para medir a vibração do veio.
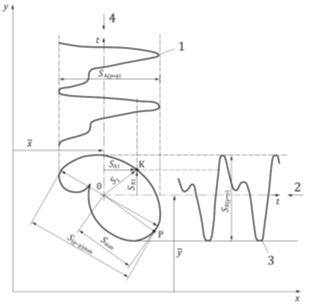
Legenda
| 1 | forma de onda do transdutor A |
| 2 | transdutor A |
| 3 | forma de onda do transdutor B |
| 4 | transdutor B |
| x, y | eixos de referência fixos |
| 0 | posição média da órbita integrada no tempo |
| ӯ | valores médios integrados no tempo do deslocamento do veio |
| K | posição instantânea do centro do veio |
| P | posição do veio, para o máximo deslocamento a partir da posição média integrada no tempo |
| S1 | valor instantâneo do deslocamento do veio |
| Smax | valor máximo do deslocamento do veio a partir da posição média 0 integrada no tempo |
| SA1, SB1 | valores instantâneos do deslocamento do veio nas direções dos transdutores A e B respetivamente |
| S(p–p)max | valor máximo do deslocamento pico-a-pico |
| SA(p–p), SB(p–p) | valores pico-a-pico do deslocamento do veio nas direções dos transdutores A e B |
| NOTA | Neste esquema ilustrativo SA(p–p) = S(p–p) vistoSA(p–p) > SB(p–p) |
Figura — Definição das grandezas de deslocamento do veio de acordo com a ISO20816
Num dado instante, o centro do veio será coincidente com o ponto K na órbita, e o valor instantâneo correspondente do deslocamento do veio a partir da posição média será S1. Contudo, na direção dos transdutores, A e B, os valores instantâneos do deslocamento do veio a partir da posição média serão SA1 e SB1, respetivamente. A relação entre estas grandezas é dada pela seguinte fórmula:

Os valores de S1, SA1 e SB1 variam com o tempo, à medida que o centro do veio se move em redor da órbita; as formas de onda medidas por cada transdutor, são mostradas na figura anterior.
NOTA – Se a órbita for elíptica, então estas formas de onda são sinusoidais puras da mesma frequência.
O valor pico-a-pico do deslocamento na direção do transdutor A, SA(p–p), é definido como a diferença entre o deslocamento máximo e mínimo do transdutor A e similarmente para SB do transdutor B. Claramente os valores, SA(p–p) e SB(p–p), não serão iguais e, no geral, serão diferentes a partir de medidas feitas noutras direções radiais. Portanto, o valor do deslocamento pico a pico depende da direção da medição.
Como essas grandezas de medição são independentes do valor absoluto da posição média, não é necessário usarem-se sistemas que possam medir tanto os valores médios quanto os alternados.
O deslocamento pico-a-pico, é a grandeza que mais frequentemente usada para monitorização da vibração das máquinas rotativas.
Enquanto a medição do deslocamento pico a pico, em quaisquer duas dadas direções ortogonais é uma questão simples, a quantidade e a posição angular do máximo deslocamento pico a pico mostrado na figura anterior é difícil de medir diretamente. Contudo, na prática, foi considerado aceitável usar grandezas de medição alternativas, que permitem obter uma aproximação adequada para o valor máximo de deslocamento pico-a-pico.
Para determinações mais precisas, é necessário examinar a órbita do veio em mais detalhe, por exemplo, com um osciloscópio.
Os três métodos mais comuns para obter aproximações satisfatórias são descritos de a seguir.
Método A: Valor resultante dos valores de deslocamento pico-a-pico do veio medidos em duas direções ortogonais
O valor de S(p–p)max pode ser obtido por aproximação da fórmula:

O uso da fórmula como uma aproximação, quando a vibração está predominantemente na frequência de rotação, geralmente sobrestima o valor de S(p–p)max , com um erro máximo de 40%.
O erro máximo ocorre, para uma órbita circular, e reduz-se progressivamente à medida que a órbita se vai tornando mais plana, com erro zero, no caso de uma órbita deformada, em linha reta.
Método B: Obtendo o valor máximo de deslocamento pico-a-pico do veio dos valores medidos em duas direções ortogonais.
O valor de S(p–p)max pode ser obtido por aproximação da fórmula a seguir:

qualquer que seja o maior.
O uso da fórmula anterior, como uma aproximação quando a vibração está predominantemente à frequência de rotação, geralmente subestima o valor de S(p–p)max, com um erro máximo de aproximadamente 30%.
O erro máximo ocorre no caso de a órbita ser plana e reduz progressivamente o seu valor à medida que a órbita se torna circular, com erro zero quando a órbita é totalmente circular.
Método C: Medição de Smax
O valor instantâneo do deslocamento do veio pode ser definido por S1, como mostrado na anterior, que é derivado das medidas do transdutor SA1 e SB1, usando a fórmula ( ). Existe um ponto na trajetória, definido por P, na figura anterior, onde o deslocamento da posição média 0, é máximo. O valor de S1 correspondente a esta posição, é designado por Smax, que é definido como o valor máximo de deslocamento de acordo com a fórmula a seguir:

O ponto na órbita onde Smax ocorre, não coincide necessariamente com os pontos onde SA1 e SB1, estão nos seus valores máximos. Claramente, para uma determinada trajetória, há um valor de Smax, sendo independente da posição dos transdutores de medição, desde que a posição média 0, não mude.
O valor de S(p–p)max pode ser obtido por aproximação usando a fórmula a seguir:

Esta fórmula está correta quando as duas medições ortogonais, das quais Smax é derivado, são de forma sinusoidal, de frequência única. Na maioria dos casos, esta fórmula sobrestima S(p–p)max uma vez que isto depende da natureza dos componentes de vibração harmónicos presentes.
Note-se que implícito na definição de Smax, está o requisito de conhecer o valor médio integrado no tempo do deslocamento do veio. A medição de Smax é, portanto, limitada aos sistemas de medição que podem medir os valores médios e alternados. Além disso, a avaliação de Smax, a partir dos sinais produzidos por dois transdutores de vibração, é um procedimento matemático relativamente complexo, que requer instrumentação especializada.
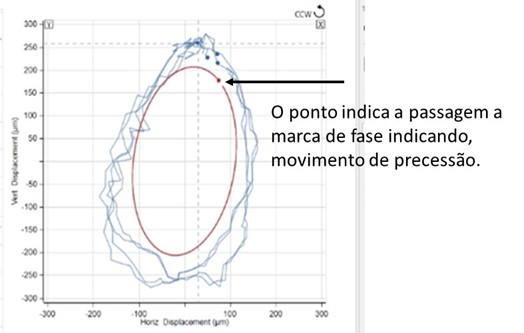
6 Turbomáquinas e órbitas – o sentido de precessão
A órbita é utilizada para determinar o sentido de precessão do veio. Por outras palavras, o sentido de rotação da órbita pode ser contrário ao sentido de rotação do veio.
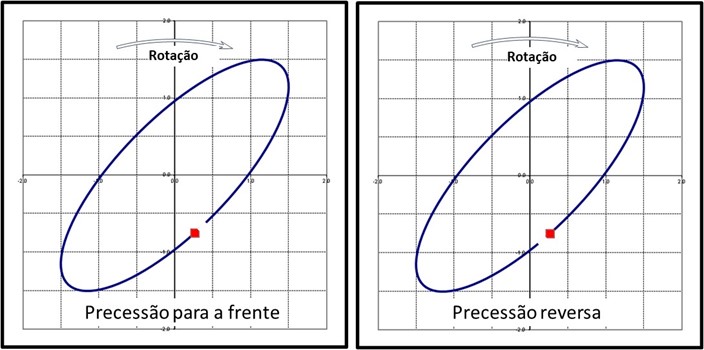
O ponto do sensor de fase indica o sentido de incremento do tempo, sentido que será o de precessão do veio. Uma vez determinado, o sentido de precessão pode ser comparado ao sentido de rotação para confirmar se estamos perante precessão para a frente (sentido de rotação e precessão coincidentes) ou para trás (sentido de precessão contrário à rotação).
Em órbitas complexas, o veio pode ser submetido a precessão para a frente durante uma parte e precessão para trás durante o restante perfil da órbita.
A precessão para frente é a vibração mais frequentemente observada. A órbita descrita pelo centro do veio gira na mesma direção da rotação. A precessão reversa acontece com a órbita descrita pelo centro do veio a girar na direção oposta à da rotação. Isto pode acontecer durante fricções entre o veio e a chumaceira, por exemplo, ou entre múltiplas velocidades críticas.
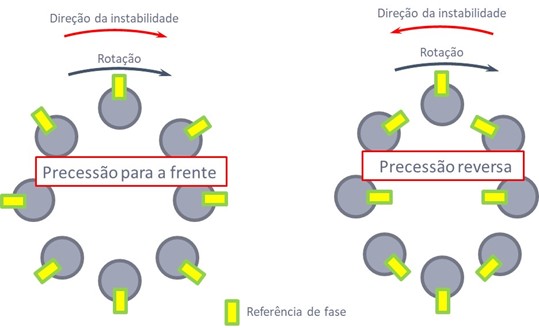
Precessão a partir da referência de fase
A convenção normal “espaço-bola” indica precessão para frente. Marcas de fase “bola – espaço” indicam precessão reversa. Para se identificar isto tem de se verificar sempre a orientação da sonda e o sentido de rotação!
A fase de diversas componentes do sinal
A órbita filtrada pode ser utilizada para estimar a fase absoluta das duas componentes do sinal.
Esta estimativa será mais precisa para órbitas circulares, e menos precisa para órbitas elípticas devido ao movimento a velocidade angular constante da órbita circular ao longo da sua trajetória (intervalos de tempo iguais e ângulos semelhantes entre pontos).
Nas órbitas elípticas, a velocidade angular da órbita não é constante (intervalos de tempo iguais, mas ângulos diferentes entre pontos). Como a fase é uma medida no tempo, estas variações na velocidade angular causam imprecisões quando se tenta estimar a fase a respeito de cada sensor.
7 Turbomáquinas e órbitas – Forma de deflexão operacional
A figura a seguir ilustra um conjunto de órbitas 1X a velocidade de rotação em que os pontos do sensor de fase indicam a localização do centro do veio, em cada plano de medida, no instante em que ocorre o impulso. Estes pontos podem ser ligados entre si por uma linha, de modo a obter uma estimativa do que será o comportamento do veio ao longo do seu comprimento.
O movimento do veio ocorre a ritmos distintos nas diferentes partes da órbita. Sem indicações adicionais, não se conhece a localização do veio a determinado instante.
O impulso do sensor de fase é a solução, fornecendo a referência no tempo para um ponto, em particular, em cada órbita.

Figura – Em cada órbita, o impulso do sensor de fase exibe a localização desse ponto do veio
8 Turbomáquinas e órbitas – apresentação da Órbita associada às ondas do sinal no tempo
Este tipo de gráfico combina a órbita com duas formas de onda do sinal no tempo. A forma de onda resultante da leitura Y é exibida em baixo da X, ambas à esquerda da órbita, como se vê na figura a seguir.
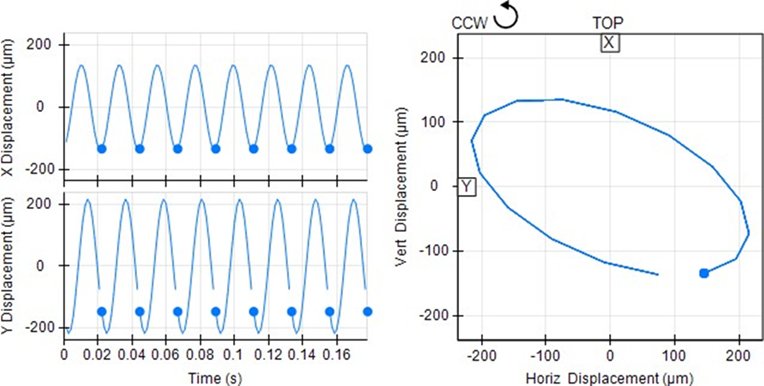
O gráfico contém informação sobre o sentido de rotação, a velocidade, a escala utilizada na órbita e a escala de tempo presente nas formas de onda.
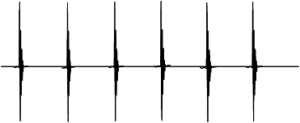
A figura a seguir é um exemplo de como utilizar estes gráficos para localizar um defeito na superfície do veio. Esta órbita possui uma forma que revela a existência de dano na superfície do veio. Normalmente, os defeitos de superfície traduzem-se por picos que apontam na direção dos sensores. As formas de onda ajudam a esclarecer o período entre estes picos e tornam possível determinar a localização angular do dano na superfície.
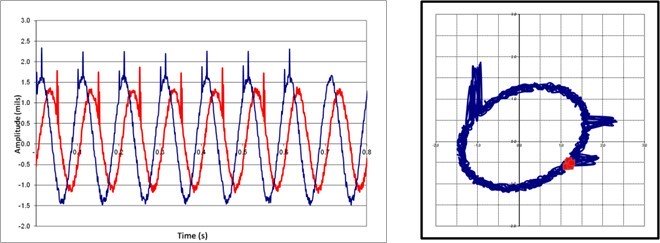
Figura – Órbita associada às formas de onda Y e X evidenciando a existência de um defeito na superfície do veio
Recorde-se que os picos positivos da forma de onda representam a passagem do veio junto ao sensor e que, a localização de montagem dos sensores, é exibida no gráfico da órbita. O impulso do sensor de fase representa o mesmo instante em todos os gráficos. Esta combinação de gráficos permite correlacionar a informação presente na órbita com a informação das formas de onda.
9 Turbomáquinas e órbitas – a compensação vetorial da Órbita
A compensação permite remover matematicamente qualquer informação indesejada de um gráfico de órbita. As órbitas filtradas a 1X podem ser compensadas por vetor para subtrair os vetores de runout de rotação lenta de cada sonda. Assim tem-se:
Órbita a 1X – Vetor da Órbita a 1X em rotação lenta = 1X Órbita Compensada
A compensação do run-out na onda da Órbita
A compensação do run-out na forma de onda, pode ser usada para eliminar “irregularidades” nos dados da órbita causados por defeitos de superfície do veio, nas áreas alvo da sonda. Uma forma de onda obtida de medições do veio em rotação lenta, quando não existem vibrações, é subtraída digitalmente dos dados da forma de onda de vibração, usando o trigger como referência. A forma de onda resultante inclui a vibração real do veio e qualquer ruído nas formas de onda não filtradas do sinal.
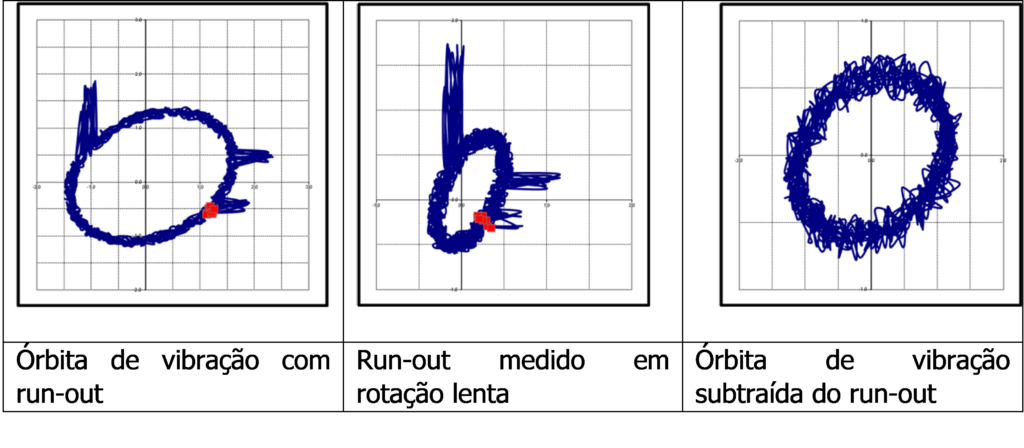
Figura – A compensação do run-out
Quando não usar a compensação do run-out na onda da Órbita
Se um rotor estiver muito empenado e for suficientemente rígido, o caminho do moente do veio pode traçar um círculo ou uma elipse plana no gráfico da linha central do veio, mesmo em rotação lenta, no girador. Por esse motivo (entre outros), é altamente recomendável não usar a subtração de runout ao realizar a análise de dados de vibração ou mesmo para equilibragem do rotor em oficina. A subtração do vetor de desvio foi pensada para “limpar” os sinais dinâmicos das irregularidades da superfície do moente, mas se o vetor de desvio for uma indicação de excentricidade, ele serve para remover a melhor indicação de excentricidade de massa, que geralmente é a causa raiz de um problema de vibração observado.
10 Turbomáquinas e órbitas – as formas das Órbitas
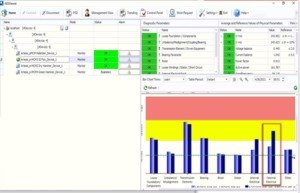
Turbomáquinas e órbitas – Desequilíbrio
O diagnóstico de desequilíbrio é realizado na amplitude síncrona que coincide com a velocidade do rotor. Isto pode ser feito visualizando os espectros de qualquer proximitor. Um diagnóstico semelhante pode ser feito visualizando os sinais filtrados de dois proximitors montados ortogonalmente como órbitas. À medida que a condição de equilíbrio se deteriora, o tamanho e, às vezes, a forma da órbita aumentará até que a amplitude pico a pico exceda os limites aceitáveis.

Turbomáquinas e órbitas – Veio fendido
Uma fenda num rotor, ou veio, pode gerar vários efeitos diferentes no comportamento da máquina:
- mudança no nível de vibração;
- alterações no ângulo de fase;
- e/ou uma mudança na frequência de ressonância quando a máquina inicia ou pára.
A análise espectral pode ser usada para identificar essa falha, mas observar órbitas síncronas e filtradas com o ângulo de fase sobreposto à órbita permite uma rápida identificação dessa condição
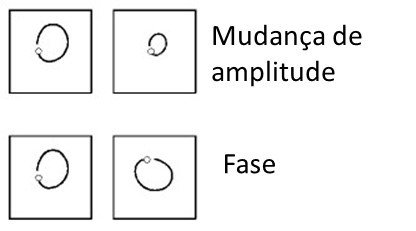
Usando as órbitas podem ser determinadas as alterações na amplitude filtrada. Ao sobrepor o sinal de entrada do ângulo de fase na órbita, pode ser facilmente determinada uma mudança neste parâmetro. Ao observar a velocidade de operação em que ocorrem as frequências de ressonância, uma alteração nessa frequência pode indicar a “possibilidade” de existir uma fenda.
A “possibilidade” deve ser enfatizada e analisada com cuidado, pois muitas outras causas podem produzir essas alterações, como suporte da chumaceira danificado ou solto, problemas de fundação, peças rotativas soltas. Por outras palavras, basicamente tudo que possa influenciar a massa do “sistema”, amortecimento e/ou rigidez
Turbomáquinas e órbitas – Parte rotativa solta
Uma peça rotativa solta, pode gerar sinais de vibração incomuns. Eles podem flutuar em amplitude e o ângulo de fase também pode mudar. Esta falha é diagnosticada mais facilmente usando análise de órbita síncrona e filtrada. Imagine uma massa, como um impulsor, que se soltou; ele pode girar livremente no eixo de forma independente.
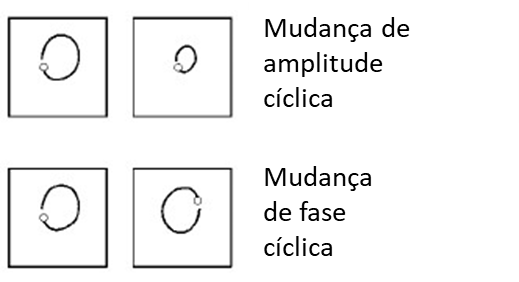
À medida que a parte solta gira, ela influencia a condição de equilíbrio do rotor, que aparece como um aumento cíclico e uma diminuição na amplitude síncrona. Isso é observável usando um analisador de espectro, mas as mudanças podem ser muito rápidas para a taxa de amostragem do instrumento. Um osciloscópio configurado para observar uma órbita filtrada irá amostrar continuamente para que as mudanças possam ser vistas.
A órbita parecerá vibrar levemente quando essa condição for criada; a peça pode estar a escorregar e depois agarrar ao veio pouco antes de se tornar uma peça rotativa completamente solta.
Turbomáquinas e órbitas – Instabilidade da película de óleo (oil whirl)
Instabilidade da película de óleo e o chicote de óleo (oil whip) às vezes são listados como uma única falha da máquina, mas uma observação mais detalhada dos sinais de vibração e das condições da máquina que causam esses sinais produzirá exibições de sinal diferentes e distintas para cada condição.
Esta falha é causada por uma condição que impede o rotor de criar uma cunha de óleo, estável na qual desliza.

Uma chumaceira projetada incorretamente é a fonte usual para condições de turbilhão de óleo, mas uma mudança na viscosidade do fluído ou no estado de alinhamento da máquina, são outras possibilidades.
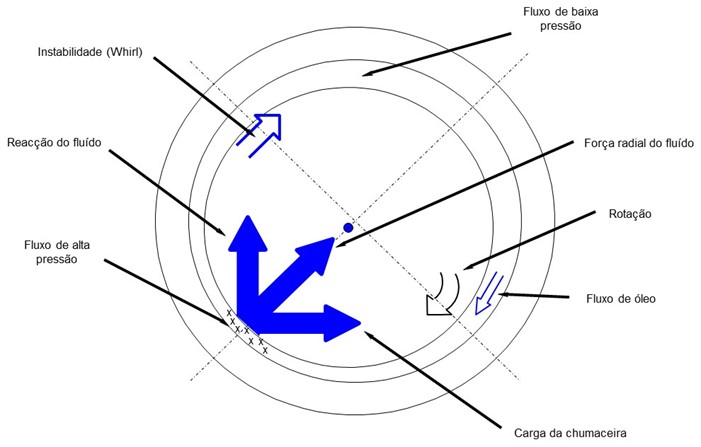
Geralmente, uma condição de instabilidade da película de óleo precede uma condição de oil whip. A análise espectral e de órbita pode ser usada para identificar qualquer condição. Esse fenômeno cria uma frequência subsíncrona individual que pode ocorrer dentro de uma gama de frequência de 35% a 48% da velocidade do rotor, dependendo do projeto ou construção da máquina/chumaceira. À medida que a máquina acelera, a frequência de giro aumenta à medida que a velocidade da máquina aumenta.
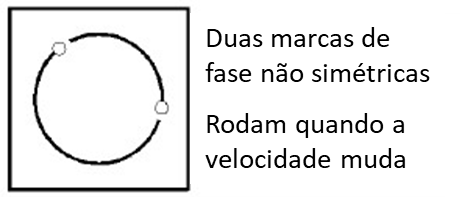
A observação da instabilidade da película de óleo como uma órbita síncrona e filtrada produz uma apresentação diferente. A órbita terá uma forma mais ou menos redonda com uma amplitude que se aproxima da folga da chumaceira e, quando o ângulo de fase for sobreposto no gráfico, a órbita parecerá ter duas marcas de fase. Essa característica deve-se à filtragem na velocidade do veio e à geração da avaria numa frequência subsíncrona. As duas marcas de fase não serão exibidas simetricamente na órbita porque a frequência da instabilidade não está exatamente na velocidade da máquina.
O fluxo regular de óleo na folga entre o moente do veio e o metal antifricção é a condição mais favorável para a criação da instabilidade.
A seguir podem-se ver alguns tipos de chumaceiras que quebram o fluxo regular da película de óleo.

Turbomáquinas e órbitas – Oil whip
O Oil whip ocorre durante os estágios posteriores de uma condição de instabilidade da película de óleo e possui uma exibição orbital distinta.

O whip pode ocorrer se uma máquina funciona a velocidades superiores a 2X a velocidade crítica do veio. Quando o veio acelera até 2X a velocidade critica, a vibração excessiva impedirá a pelicula de óleo de suportar o veio. A velocidade do Whirl fixar-se-á na velocidade crítica e, quando a velocidade de rotação da máquina aumentar, a frequência do whip não aumentará. Isto pode ser visto com facilidade num mapa espetral efetuado por um analisador de vibrações.
Nestas condições a órbita, com a entrada de fase sobreposta, parece ter várias marcas de fase. Esta exibição será de forma redonda e a amplitude será maior que a amplitude observada durante a instabilidade da película de óleo.
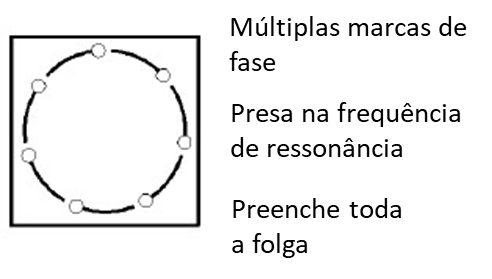
O tamanho da órbita será maior porque o veio ocupa toda a folga da chumaceira, pois não pode mais ser estabelecida pelo rotor uma cunha de óleo e o veio está em contato direto de metal com metal, com a chumaceira. A exibição da órbita não girará mais porque a frequência do turbilhão de óleo coincidiu com a primeira ressonância natural, ou velocidade crítica, e “travou” nessa frequência. O oil whip é uma condição perigosa porque o rotor usa toda a folga da chumaceira e está em contato direto de metal com metal que desgastará a chumaceira rapidamente e destruirá o rotor se não for corrigido.
Turbomáquinas e órbitas – Pré-carga excessiva
Todas as máquinas com chumaceiras de pelicula de óleo têm alguma quantidade de pré-carga para que possa ser estabelecida uma cunha de óleo estável. A pré-carga pode ser produzida interna ou externamente. Fontes internas de pré-cargas são de engrenagens ou cargas hidráulicas, durante as ações de bombagem. As pré-cargas externas podem ser provenientes de desalinhamento do acoplamento ou de dilatações na tubagem e no sistema de suporte. Essas fontes de pré-carga criam uma órbita elíptica que é achatada na direção do vetor de pré-carga
À medida que a pré-carga aumenta, a órbita é achatada. À medida que a pré-carga excessiva aumenta ainda mais, a órbita começa a entrar em colapso para formar uma forma de “banana” enquanto o veio tenta continuar seu padrão e direção de rotação normais.
Depois que a órbita ser achatada na forma de “banana”, aparece no espectro uma frequência a 2X. Pré-cargas mais fortes distorcem ainda mais a órbita em forma de oito. À medida que a pré-carga aumenta, a linha central do veio desloca-se na direção do vetor de pré-carga.
Turbomáquinas e órbitas – Fricção
Um problema comum em rotores recém-reconstruídos ou modificados é uma leve fricção quando o rotor é operado inicialmente. As fricções do rotor não são um fenómeno que continue por um período prolongado. Este fenómeno geralmente aumenta as folgas até que o atrito seja eliminado ou, se não forem corrigidos, desgastarão as folgas internas até que a máquina não possa ser operada. A forma da órbita será diferente dependendo da relação da velocidade do veio com a primeira frequência natural e a gravidade do atrito.
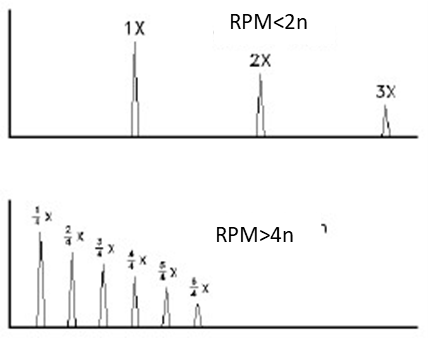
Os espectros de condições de fricção são caracterizados por diversas frequências distintas que ocorrem em múltiplos da velocidade de rotação. A frequência fundamental dependerá da relação da velocidade do veio com a primeira frequência natural. Em velocidades de veio até duas vezes a frequência natural, a frequência coincidirá com a velocidade do veio com múltiplos de 2X, 3X, etc. Entre duas e três vezes a primeira frequência natural, são geradas frequências à velocidade do veio, com múltiplos em 1X, 3/2X, 2X, 5/2X, etc. Entre três e quatro vezes a frequência natural, as frequências geradas serão à velocidade do veio com múltiplos em 2/3X, 1X, 4/3X, 5/3X, 2X, 7/3X, etc.

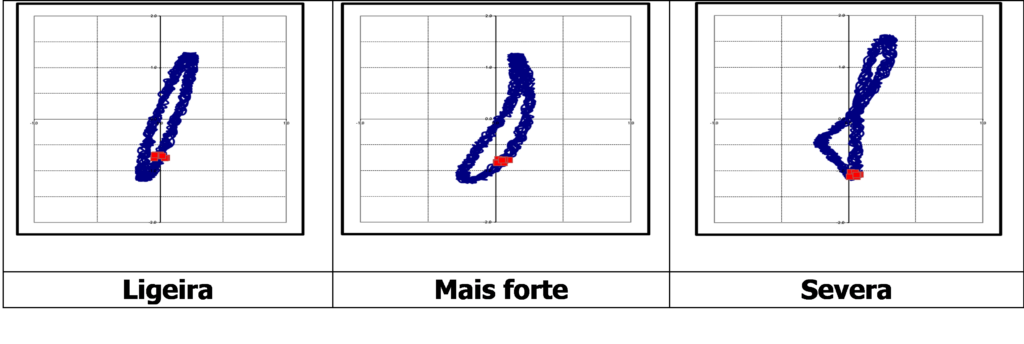
A gravidade da fricção afetará a forma da órbita. Uma leve fricção produzirá uma órbita em forma de “gota de lágrima”, com o ponto da lágrima coincidindo com o ponto de impacto. À medida que o atrito fica mais forte, a órbita achata-se e pode aparecer como uma pré-carga excessiva.
Em velocidades de máquina mais altas (acima de duas vezes a primeira frequência natural), as órbitas não filtradas começarão a ter voltas (loops) internos com a frequência de fricção fundamental inversamente proporcional ao número de voltas internos. Estas voltas internas terão suas próprias marcas de fase exibidas e as voltas estarão localizadas de forma simétrica no gráfico.
Turbomáquinas e órbitas – As voltas nas Órbitas e o sentido de precessão
As voltas nas Órbitas indicam a presença de vibração não síncrona. As voltas externas são causadas pela precessão dominante dos componentes não síncronos. As voltas internas são causadas pela precessão reversa dominante dos componentes não síncronos.