Turbomaquinaria y Bodé
Una medida importante realizada utilizando la capacidad de seguimiento de pedidos de los analizadores de vibraciones es la de la arranques y paradas de turbomaquinaria e Bodé.
Este artículo pertenece a una serie., el cual constituye el material de apoyo para el curso de análisis de vibraciones en turbomaquinaria. Los enlaces a los otros artículos se pueden encontrar aquí.
Importancia de los datos adquiridos en un régimen transitorio
En muchas máquinas, la única vez que operan a ciertas velocidades importantes (o sea. velocidades críticas, en resonancias estructurales, etcétera) es durante un arranque o parada.
La vibración transitoria proporciona una gran cantidad de información que no está disponible a partir de datos de estado estable.. Entre ellos están:
- La capacidad de comparar la amplitud de la vibración., una fase, la posición del eje, etcétera, a velocidades por encima y por debajo de las velocidades críticas del husillo
- La mejor firma de las frecuencias naturales globales del rotor., que normalmente son el resultado de la compleja relación entre los soportes del rotor del rotor (aspectos, vedantes, etcétera) y la naturaleza dinámica del propio rotor
Tan importante como las comparaciones enumeradas anteriormente es la capacidad de comparar datos transitorios antes y después de que exista un problema en la máquina.. Las evaluaciones del estado de la máquina son mucho más fáciles cuando tiene la capacidad de comparar antes y después.
Del mismo modo, es muy importantey evaluar muchos tipos diferentes de gráficos para mostrar datos de vibración. El uso de un solo tipo de gráfico limita la capacidad del especialista en máquinas para obtener una “imagen” buen estado de la maquina.
Esta medida es una indicación importante del estado de las máquinas y generalmente se utiliza para calificar nuevas máquinas de alta velocidad o después de una revisión.. La medición utiliza el desequilibrio residual en la máquina para excitarla a diferentes frecuencias., ya que trabaja a la velocidad operativa y mide la respuesta (magnitud y fase) en función de la velocidad. Utiliza las capacidades básicas de seguimiento de pedidos del analizador de vibraciones junto con características especiales para mostrar los resultados de esta medición..
O Bodé
Los diagramas de Bodé son un método común para mostrar datos transitorios. Típicamente exhiben vibración global o síncrona (sin embargo, Los datos nX también se pueden mostrar) y fase correspondiente, contra la velocidad de rotación.

Turbomaquinaria y Bodé – Figura 1– El diagrama BODÉ de puesta en marcha de una máquina, mostrando las velocidades críticas. El gráfico superior muestra el nivel de vibraciones., el medio la fase y el inferior la velocidad de rotación. El nivel de vibraciones y la fase se muestran en función de 1 x RPM
un beneficio de analizadores de vibración en esta medida, es su capacidad para seguir simultáneamente varias órdenes y mostrarlas, más allá de la velocidad de rotación fundamental (1ª orden); así como el nivel general y el perfil de rpm como se ve en la figura.
Turbomaquinaria y Bodé – Figura 2– Diagrama BODÉ de puesta en marcha de una máquina, con presentación de segundo y tercer orden, así como el nivel general y las RPM de la máquina.
Las frecuencias naturales del rotor se pueden determinar localizando el pico en la amplitud de vibración que también corresponde a un cambio de fase de aprox. 180 Fase estrictamente igual en las mediciones en la misma dirección en los cojinetes a ambos lados del acoplamiento dentado.
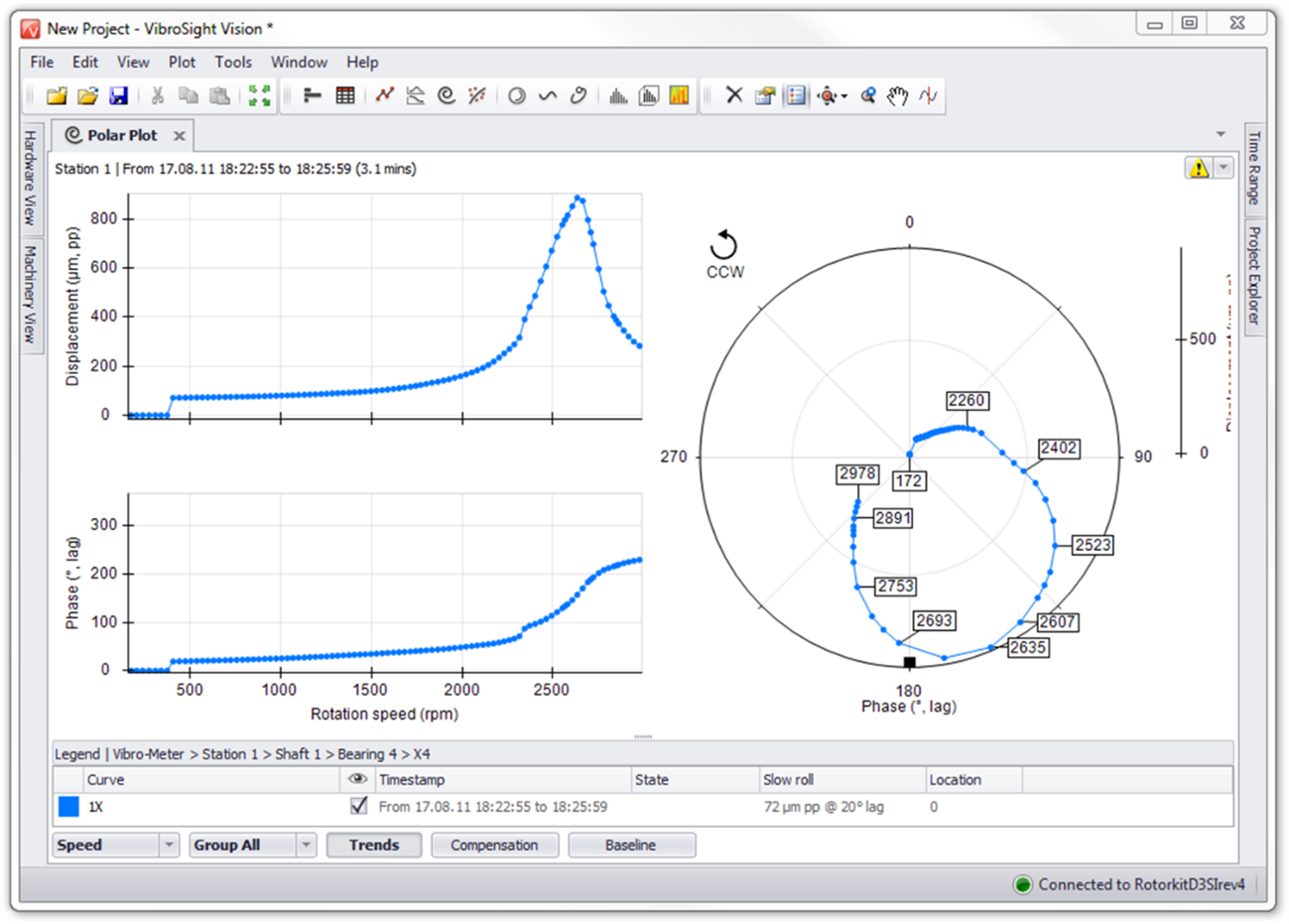
Los diagramas polares muestran los mismos datos que los diagramas de Bodé, solo que en un formato diferente. A veces, los diagramas polares facilitan determinar cuándo el rotor ha cruzado su velocidad crítica, porque el cambio de fase es obvio (o sea, en cada 180 grados en el grafico). Por ejemplo, del diagrama de Bodé mostrado en el anterior, no es inmediatamente obvio que este rotor se está acercando a la segunda velocidad crítica. Sin embargo, en el gráfico polar esto es muy claro.
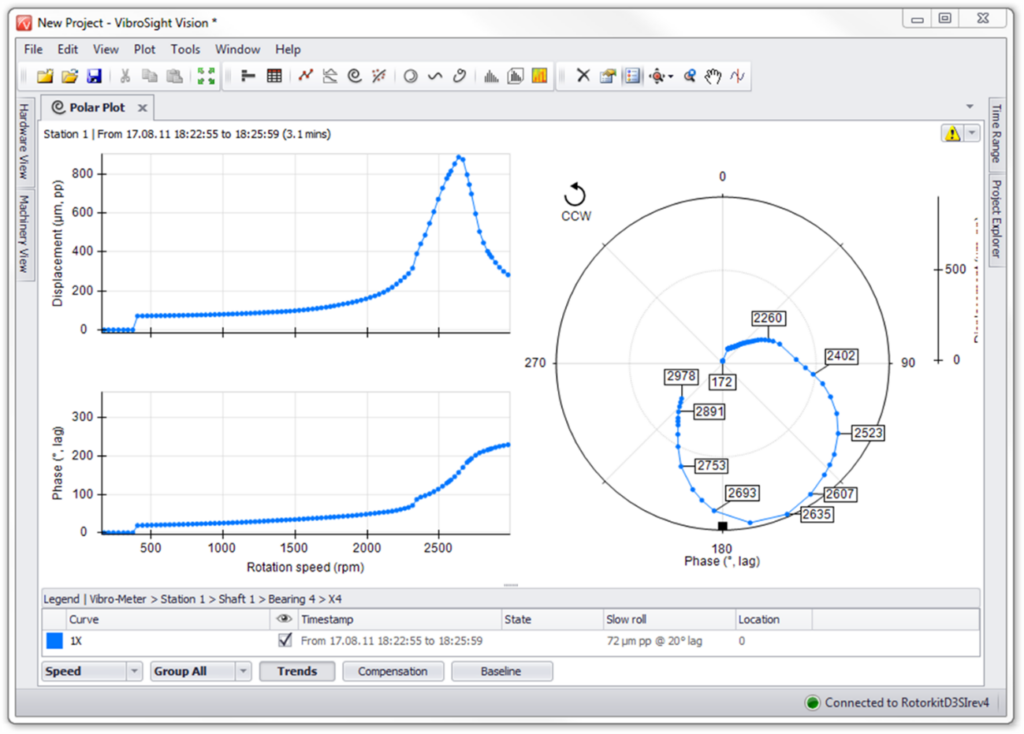
Turbomaquinaria y Bodé - Figura 3
Los diagramas de Bodé y Polar pueden compensarse por excentricidad (vibraciones relativas). Todas las áreas donde las medidas del proximitor tienen alguna cantidad de desviación física y/o eléctrica. Los datos vectoriales se corrigen para esta excentricidad restando vectorialmente el vector de vibración a muy bajas rpm de todos los datos vectoriales obtenidos..
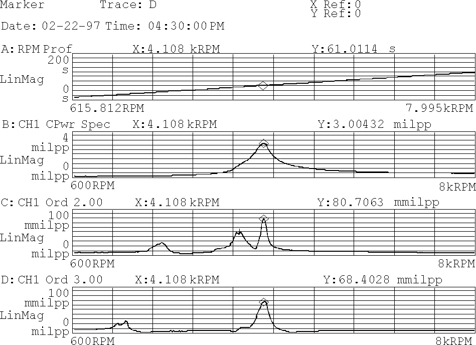
Ejemplo de resonancia identificado con el Presagiar
Este diagrama de Bodé muestra dos frecuencias resonantes, el primero en 2200 RPM, que no afecta el funcionamiento de la máquina. La segunda, es el 3515 RPM que es la velocidad de rotación de la máquina dando lugar a un fenómeno de resonancia.
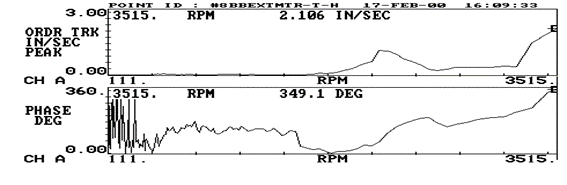
Turbomaquinaria y Bodé - Figura 4
Turbomaquinaria y Bodé – Entendiendo el diagrama de Bode
El rotor Laval-Jeff
Se requiere una comprensión básica de la dinámica del rotor para interpretar mejor los datos de vibraciones transitorias. El rotor Laval-Jeffcott proporciona un modelo simplificado de un rotor entre cojinetes, como se ve en la figura 1. En este modelo, la rigidez reside toda en el eje y la masa reside en todo el disco..

Turbomaquinaria y Bodé - Figura 5 – O rotor Laval-Jeffcott
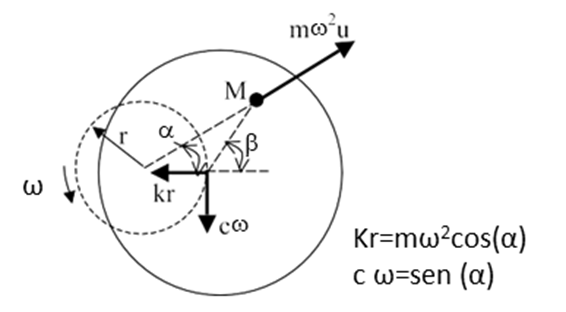
El disco desequilibrado está ubicado en el centro del rotor sin masa sobre soportes rígidos.. La única amortiguación en el sistema se debe a la resistencia del aire viscoso.. Aunque el rotor Laval-Jeffcott es un modelo muy simple, puede proporcionar una gran cantidad de información sobre los efectos de la vibración síncrona en la turbomaquinaria. Una vista superior del rotor Laval-Jeffcott muestra la relación entre el centro de masa (METRO) y el centro geométrico (do).

| tu | = radio de desequilibrio |
| do | = centro geométrico |
| b | = ángulo de fase síncrono |
| METRO | = centro de masa del desequilibrio |
Turbomaquinaria y Bodé - Figura 6 – Vista superior del rotor Laval-Jeffcott.
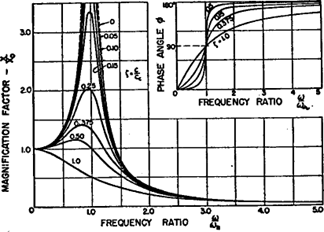
Respuesta del rotor Laval-Jeff en amplitud y fase con respecto a un desequilibrio
El ángulo de fase síncrona (b) es la diferencia entre el vector de desequilibrio (la) y el vector de desplazamiento (R). La amplitud de rotación síncrona y el ángulo de fase del rotor Laval-Jeffcott cuando pasa por la resonancia del primer rotor. (velocidad crítica) se muestran en la figura 3.

Turbomaquinaria y Bodé - Figura 7. Respuesta síncrona y ángulo de fase rotor Laval-Jeffcott.
La ecuación de amplitud de respuesta se presenta en Ecuación (1).

Una explicación física de estos gráficos muestra que:
- Muy por debajo de la velocidad crítica, el vector de respuesta R y el vector de desequilibrio U están en fase (es decir, b ~ 0).
- A medida que aumenta la velocidad de rotación, el vector de desequilibrio U comienza a adelantarse a R.
- A medida que se pasa la velocidad crítica, b pasa por 90 grados y luego se aproxima asintóticamente 180 grados a velocidades superiores a las críticas.
- tan, a velocidades muy por encima de la velocidad crítica, el centro de masa del rotor (METRO) se mueve hacia el centro de la órbita de rotación y se queda quieto, mientras que el centro del eje gira alrededor del centro de masa.
Así, como se muestra en la siguiente figura..
Turbomaquinaria y Bodé - Figura 8
Turbomaquinaria y Bodé – Significado físico de la variación de fase
¿Cómo se explica, entonces, que a partir de la velocidad crítica no se vea el efecto del aumento de la fuerza centrífuga por el aumento de la velocidad de rotación??
repitiendo, a velocidades muy por encima de la velocidad crítica:
- El centro de masa del rotor. (METRO) se mueve hacia el centro de la órbita de rotación y se queda quieto,
- A medida que el centro del eje gira alrededor del centro de masa.
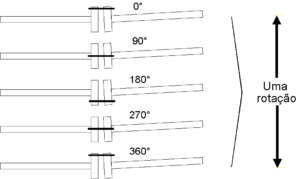
mira el video:
Se ve que por encima de la primera frecuencia natural el resorte no transmite suficiente fuerza. (no lo suficientemente rígido) para mover la masa y es como si se negara a moverse, por su inercia.
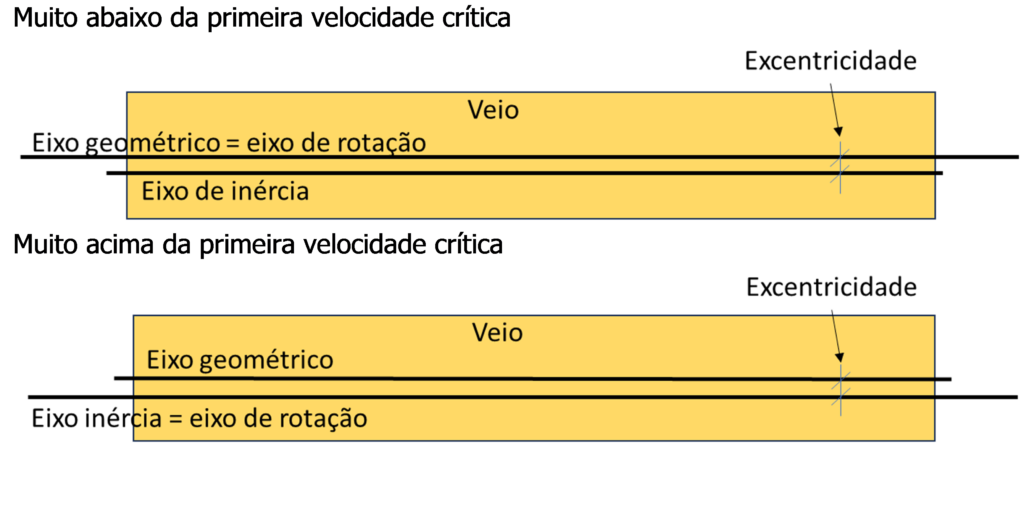
En otras palabras, muy por encima de la velocidad crítica, la fuerza de inercia es mayor que la fuerza de rigidez que puede transmitir el resorte, como se puede ver en la siguiente figura.
Turbomaquinaria y Bodé - Figura 9
O sea, muy por encima de la velocidad crítica, el eje gira alrededor del centro de masa. La amplitud del movimiento corresponde a la excentricidad entre el eje de inercia y el eje geométrico.
Respuesta del rotor Laval-Jeff en amplitud y fase a fuerzas que no dependen de la frecuencia
Adicionalmente, el efecto que tienen las fuerzas no dependientes de la frecuencia sobre la amplitud de rotación se muestra en la Figura.
Turbomaquinaria y Bodé - Figura 10 – Respuesta síncrona a una fuerza constante, o sea, por ejemplo, desalineación.
La respuesta síncrona efectiva será una combinación de Figuras 6 mi 10.
Relación entre las fuerzas de rigidez, amortiguación y desequilibrio para el rotor Laval-Jeffcott
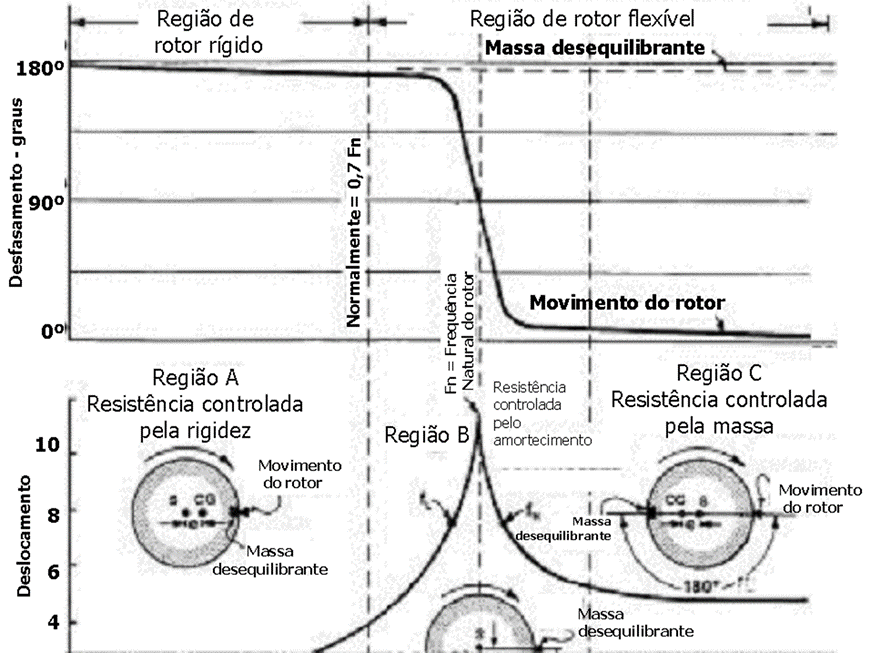
A figura 11 La siguiente es una ilustración de las fuerzas de rigidez, de amortiguamiento y desequilibrio para el rotor Laval-Jeffcott a velocidades por debajo de, en, y por encima de la primera resonancia de equilibrio.
Turbomaquinaria y Bodé - Figura 11 – respuesta síncrona a continuación, ya, y por encima de la velocidad crítica.
De esta forma, la relación entre las fuerzas de rigidez, amortiguamiento e inercia, a diferentes velocidades, es lo que se puede ver en la Tabla I a continuación..
Tabla I Relación entre fuerzas de rigidez, amortiguamiento e inercia, a diferentes velocidades

Como se puede ver, muy por debajo de la primera frecuencia resonante, la rigidez del eje es aproximadamente igual a la fuerza de desequilibrio. Sin embargo, en la resonancia, amortiguamiento es el único término que restringe el desplazamiento debido al desequilibrio. De la misma forma, a medida que la velocidad aumenta más allá de la resonancia, el rango de rotación, r, se aproxima al valor de la excentricidad del centro de masa, tu (suponiendo que no hay otras fuerzas de excitación, como la desalineación, fricción interna, etcétera).
Turbomaquinaria y Bodé – Cantidad de amortiguamiento en el sistema de rotor -Q
Una vez en resonancia, la amortiguación es la única fuerza que contiene el desplazamiento del rotor Laval-Jeffcott, medir el desplazamiento a medida que el rotor pasa a través de la resonancia es un buen método para determinar la cantidad de amortiguamiento en el sistema del rotor.
El factor de amplificación síncrona (q) es una medida de la severidad de una resonancia, así como una indicación de la amortiguación presente. Aunque hay varios métodos disponibles para medir Q, aquí se utiliza el método de media potencia porque es el más ampliamente aceptado. La definición básica se da a continuación en la ecuación. (2)

El ancho de banda de frecuencia es la diferencia entre las frecuencias en las que la amplitud es 3 dB menos que el máximo en el pico de resonancia. esto corresponde a 0,707 veces la amplitud en resonancia. Este método fue adoptado por el Instituto Americano del Petróleo (API) para medir el factor de amplificación síncrona.
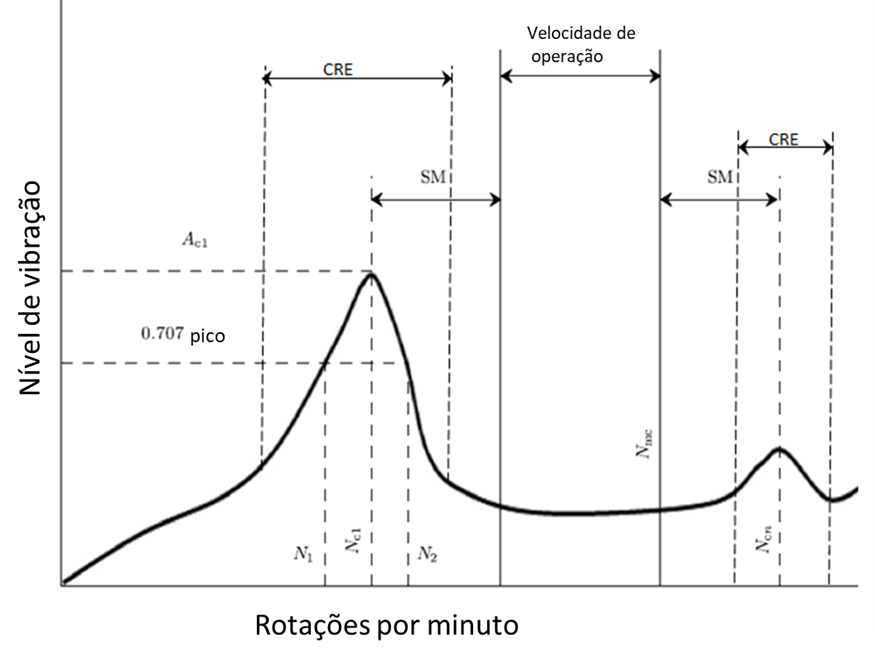
| nortec1 | = Centro de frecuencia de la primera velocidad crítica (ciclos por minuto) |
| nortecn | = velocidad crítica |
| nortemc | = Velocidad continua máxima, 105 por ciento |
| norte1 | = menor velocidad, a 0,707x la amplitud máxima de la velocidad crítica |
| norte2 | = mayor velocidad, a 0,707x la amplitud máxima de la velocidad crítica |
| norte1-norte2 | = Ancho de pico a la mitad del nivel de potencia |
| q | = factor de amplificación = |
| SM | = Margen de separación |
| CRE | = Envolvente de respuesta crítica |
| UNAc1 | = Nivel a NC1 |
| UNAcn | = Nivel a Ncn |
Turbomaquinaria y Bodé - Figura 12 – Definición de Factor de Amplificación Síncrona según el API 617.
En general:
- Las máquinas con factores de amplificación síncrona inferiores a cuatro se consideran muy bien amortiguadas..
- Los valores entre cuatro y ocho se consideran adecuadamente amortiguados y normalmente son estables..
- entre ocho y 15 se consideran marginales, aunque muchas máquinas más antiguas pueden operar en el área.
- Los factores de amplificación anteriores 15 se considera que tienen una amortiguación insuficiente y es muy probable que tengan problemas de estabilidad y fricción de arranque.
El factor de amplificación síncrona es un parámetro de diagnóstico importante para evaluar la estabilidad de la máquina y comparar el estado de la máquina antes y después de la existencia de un problema en el equipo.. Como se puede ver en la Figura 3, el factor de amplificación aumenta a medida que disminuye la amortiguación del sistema. Dado que la mayor parte de la amortiguación en máquinas de alta velocidad proviene de los cojinetes hidrodinámicos, los cambios en el factor de amplificación síncrona pueden indicar un cambio en la amortiguación proporcionada por los rodamientos. Qué, a su momento, puede indicar un cambio en el estado de los cojinetes.
El rotor Laval-Jeffcott con soportes de cojinetes flexibles
Dado que la mayoría de las turbomaquinarias están soportadas por cojinetes hidrodinámicos, los efectos de los apoyos flexibles también deben ser considerados. El rotor Laval-Jeffcott se puede modificar para tener almohadillas de cojinete flexibles (Figura 7).

Turbomaquinaria y Bodé - Figura 13 – Rotor Laval-Jeffcott con soportes flexibles
Los soportes flexibles son deseables desde el punto de vista de la dinámica del rotor porque:
- Puede reducir la carga dinámica transmitida al marco;
- Permitir que la amortiguación en los apoyos sea más efectiva (o sea, soportes menos rígidos permiten más velocidad en los soportes, lo que se necesita para amortiguar).
Relación entre la fuerza generada y la fuerza transmitida – Transmissibilidade
La relación de transmisibilidad calculada (FB/FX) para diferentes valores de amortiguamiento se muestra en la figura 8.

Turbomaquinaria y Bodé - Figura 14 – Relación transmisibilidad versus velocidad del husillo con velocidad crítica
Como se puede ver, la amortiguación reduce la fuerza transmitida a los rodamientos en resonancia, pero en realidad lo hace más grande para ω/ωnorte > 1,14. Esto contrasta con la Figura 3, donde la amortiguación tiene un efecto deseable en el rango de rotación para todo el rango de velocidad. En general, Es deseable (desde el punto de vista de la respuesta síncrona y la estabilidad) que la relación entre la rigidez del rodamiento y la rigidez del eje (KB/Kél vino) ser lo más bajo posible, con la restricción obvia de que la baja rigidez de los cojinetes no debe hacer que la máquina funcione más cerca de la resonancia.
Direcciones de rigidez del soporte del rotor
Además, la rigidez del soporte del rotor no siempre está en la dirección principal (esto es, la rigidez principal produce una fuerza opuesta a la dirección de desplazamiento del rotor). Los coeficientes de rigidez y amortiguamiento de un soporte de cojinete o sellos se pueden dividir de la siguiente manera .
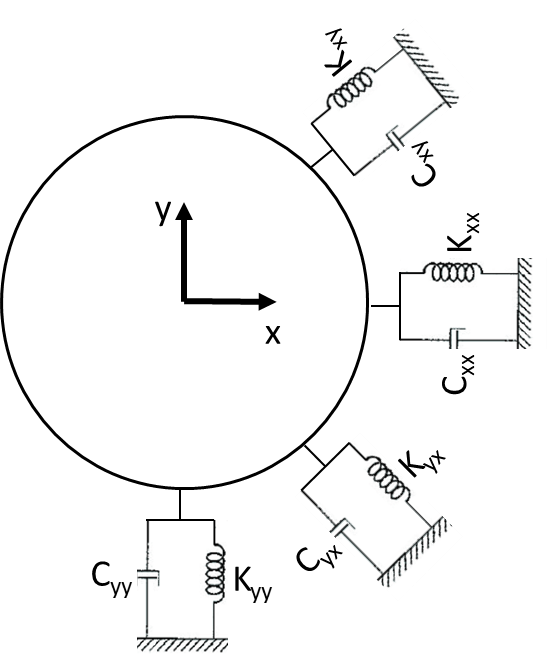
Turbomaquinaria y Bodé - Figura 15 – Coeficientes de rigidez y amortiguamiento de los apoyos.
5 – Coeficientes de rigidez y amortiguamiento de los apoyos.
Los términos Kxy mi kyx generalmente se designan por términos de “acoplamiento cruzado” (si el eje se desplaza en la dirección vertical, la rigidez del acoplamiento cruzado produce una fuerza de reacción en la dirección horizontal) y reducir los efectos positivos de amortiguamiento si Kxy (-Kyx) > 0. Por esta razón, cuando kxy > 0, aumenta el factor de amplificación del rotor y se reduce la estabilidad. la ecuacion (3) da la respuesta de un rotor rígido sobre soportes flexibles, incluyendo efectos de acoplamiento cruzado. Tenga en cuenta que cuando Kxy > 0, reduce el término de amortiguamiento y aumenta el factor de amplificación. Por esta razón, cuando el factor de amplificación se mide a partir de datos de campo, es en realidad una medida de la combinación de amortiguamiento directo y rigidez de acoplamiento cruzado presente en la máquina..

desequilibrio, la simetría y el origen de las vibraciones
La causa principal de las vibraciones que se encuentran con más frecuencia en las turbomáquinas es la desequilibrio que inadvertidamente se introdujo, por ejemplo, en el conjunto rotor turbina-generador.
El punto fundamental a reconocer es que la inercia de cada objeto generará una fuerza que tenderá a hacer que el rotor gire alrededor de su verdadero centro de masa cuando se aplique cualquier torque.. Esto es causado por la inercia de las partículas que componen el objeto al iniciar el movimiento circular inducido por un binario. La única manera de evitar esta rotación natural del centro de masa, es a través de una fuerza restrictiva que se impone sobre el objeto, para mantenerlo en rotación descentrada forzada, que obliga al verdadero centro de masa a moverse lateralmente o girar alrededor del eje de rotación forzado.
Como resultado de esta asimetría de rotación impuesta, una parte de la energía total suministrada por el par de entrada para acelerar la masa del rotor se convierte en lo que finalmente se observa como “vibración” (mas precisamente, la deflexión radial y la traslación lateral del eje en el muñón del rotor).
Esta energía se manifiesta en la fuerza centrífuga generada por la inercia de cualquier porción de masa giratoria que, es asimétrica con respecto al eje de rotación forzada. Esta fortaleza es lo que típicamente se reconoce como “desequilibrio”. En combinación con toda la fuerza centrífuga es(s) fortaleza(s) de reacción de(s) punto(s) de restricción que mantiene esta forma forzada de rotación.
Con respecto a la vibración del rotor del generador de una turbina, La gran mayoría de los problemas de vibración surgen cuando la posición y orientación previstas del rotor (centrado concéntricamente alrededor de sus cojinetes y acoplamientos) no corresponde a donde el rotor naturalmente quiere ir cuando es acelerado por torque, dada la presencia de excentricidad de masa (inherente a un rotor o inducido por desalineación con otros rotores).
La cantidad de fuerza parasitaria (o potencia, cuando se considera a lo largo del tiempo) que actúa para impulsar la vibración del rotor está directamente relacionado con la cantidad de fuerza requerida para mantener el rotor en su posición de funcionamiento prevista cuando no tiende a hacerlo de forma natural.
Cuando hay excentricidad de masa, las restricciones físicas que mantienen un rotor que gira horizontalmente en su estado previsto, pero “antinatural”, son las revistas mantenidas por la gravedad y los acoplamientos (y la masa conectada) de rotores adyacentes.
La potencia perdida bajo estas restricciones es “robado” de energía de torque de entrada y convertida en puntos de disipación no deseados, a saber, material, vibración de las estructuras de soporte, y en energía potencial que desvía/dobla el “mola” del rotor a medida que su eje de masa media se desplaza lateralmente (gira) alrededor del eje de pivote, particularmente, en la primera región de velocidad crítica.
Es importante observar que, el propósito de reducir la vibración del rotor, debe centrarse en restaurar la tendencia de rotación natural (alrededor del eje del centro de masa) para que coincida con el eje de rotación geométrico concéntrico diseñado, centrado en los acoplamientos del rotor, para crear el comportamiento dinámico natural de un rotor idealmente concéntrico.
Al hacerlo, la mayoría de los otros problemas dinámicos (respuestas resonantes del rotor, inestabilidades de los rodamientos, etcétera) también desaparecer, una vez que dejan de tener fuerza motriz.
Desde la perspectiva de la dinámica del rotor más tradicional, la suposición natural es que, por debajo de la primera velocidad crítica, un rotor siempre gira alrededor del eje geométrico, coincidente con el eje de los diarios, a cualquier velocidad y cualquier asimetría de masa que genere vibraciones debe considerarse como desequilibrio con respecto a este eje de rotación. tan, es común que la mayoría de las amplitudes de desplazamiento excesivo se consideren objetivos a resolver con fuerzas de peso de equilibrio.
Esto puede crear problemas cuando la fuente real de asimetría de masa en un rotor continuo o en un conjunto de rotor proviene de la desalineación y deformación del rotor., o cuando se observa una respuesta de vibración no deseada por encima de la primera velocidad crítica del sistema. Además, la colocación de pesos no necesariamente permite alcanzar un estado verdadero “equilibrado”, definida como la suma de todas las fuerzas y la suma de todos los momentos, siendo cero.
Cuando no se alcanza una verdadera condición de equilibrio, momentos axiales residuales actúan para doblar o distorsionar el rotor, crear movimiento y fuerzas residuales y, a menudo, crear una orientación autoalineable “natural” modificado (dentro de las holguras de cojinetes y sellos) que sigue sin corresponder al eje de la chumacera del rotor. Estas condiciones del rotor son identificables en los gráficos de vibración..
Turbomaquinaria y Bodé – El significado físico de las vibraciones relativas y absolutas.
Las vibraciones relativas medidas por un par de en cojinetes de película de aceite indicar:
- El movimiento relativo del eje con respecto a los cojinetes.;
- El movimiento del centro del eje..
Como vibraciones absolutas, medidas de los rodamientos, indicar las fuerzas transmitidas por el eje a los cojinetes.
Turbomaquinaria y Bodé – Los diferentes factores que influyen en la amplitud y fase del Bodé
El desplazamiento que ves en un gráfico de Bodé siempre será el resultado de diferentes efectos., como por ejemplo:
- Desplazamiento debido a la deformación asociada con los modos de vibración cuando está cerca y por encima de las velocidades críticas;
- Desplazamiento debido a la deformación asociada con alabeo y desalineación;
- Desplazamiento por desequilibrio;
- Desplazamiento debido a la oscilación del muñón del eje en la película de aceite.
Para entender los gráficos, uno tiene que entender cómo interactúan estos efectos..
Turbomaquinaria y Bodé – la situación ideal
A medida que aumenta la velocidad de un grupo de rotores flexibles, la tasa de aumento en la amplitud de la desviación radial, junto con el cambio del ángulo de fase, indica qué parte de la amplitud de vibración observada se debe a la flexión estática y cuánto se debe a la deflexión elástica inducida adicionalmente o al modo de vibración respectivo asociado.
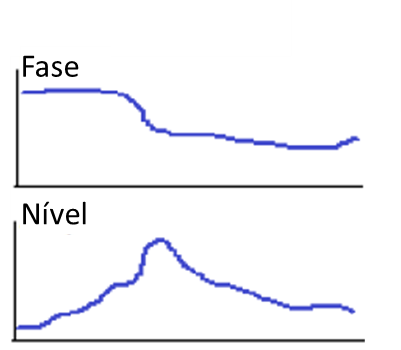
No caso ideal, la amplitud debe permanecer plana o con muy poca respuesta en todo el rango de velocidad y experimentar un cambio de ángulo de fase a cualquier velocidad crítica, como se ve en los gráficos a continuación.

Turbomaquinaria y Bodé - Figura 16
Turbomaquinaria y Bodé – el desequilibrio
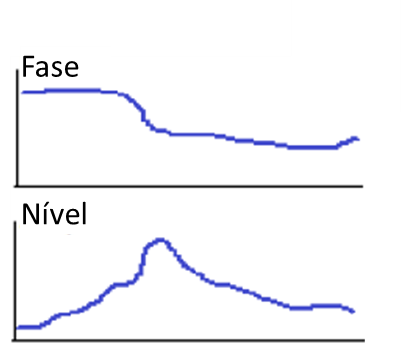
En un gráfico de Bode, el identificador más importante de la presencia de desequilibrio es el patrón de pendiente de amplitud en proporción a la velocidad, en combinación con la presencia o ausencia de cambio de ángulo de fase radial.
Turbomaquinaria y Bodé - Figura 17
Turbomaquinaria y Bodé – Se acaba e empeno e desalineación
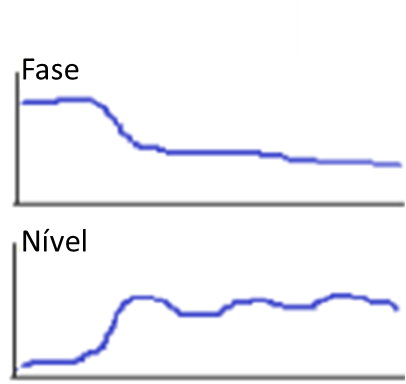
Si la amplitud a baja velocidad ya es diferente de cero, esto es indicativo de una deformación o desequilibrio del rotor, y también es a menudo proporcional a la rigidez del rotor.
Una amplitud distinta de cero desde una velocidad baja y permanecer plano, y sin ningún cambio de ángulo de fase, sugiere la presencia de algunos vibraciones relativas o un compromiso, o la existencia de un posible “efecto manivela”, en el conjunto rotor debido a un muñón excéntrico o un acoplamiento no concéntrico como se ve en los siguientes gráficos.

Turbomaquinaria y Bodé - Figura 18
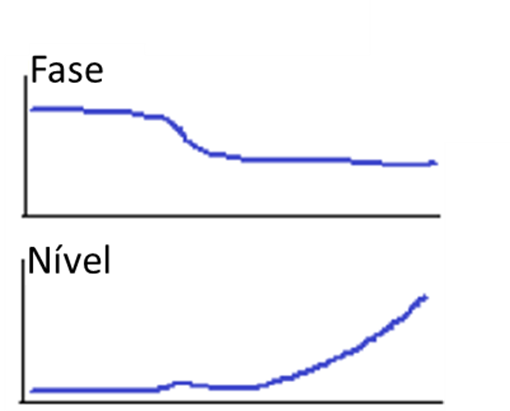
Un aumento inicial en la amplitud sin un cambio perceptible en la fase sugiere una deformación o un desequilibrio puros del rotor impulsados por la fuerza centrífuga., una órbita del eje en el cojinete, de amplitud creciente, debajo del comienzo de la primera región de velocidad crítica como se ve en los gráficos a continuación.
Turbomaquinaria y Bodé - Figura 19
Esta es la condición en la que el rotor se ve obligado a realizar un movimiento., no concéntrico, con su eje geométrico.
Si la amplitud continúa aumentando mientras el ángulo de fase comienza a cambiar, esto indica que se está agregando un componente dinámico/forma de vibración al movimiento giratorio como se ve en el gráfico a continuación. Si el cambio de ángulo de fase total es notablemente menor que 180 Fase estrictamente igual en las mediciones en la misma dirección en los cojinetes a ambos lados del acoplamiento dentado, esto indica que la amplitud de la órbita del eje en el rodamiento es dominante sobre cualquier desviación elástica asociada con el modo de vibración respectivo.
Turbomaquinaria y Bodé - Figura 20
Turbomaquinaria y Bodé – La influencia del comportamiento de otros rotores acoplados
Si el ángulo de fase cambia 180 Fase estrictamente igual en las mediciones en la misma dirección en los cojinetes a ambos lados del acoplamiento dentado, con un cambio mínimo en el rango de desplazamiento, esto sugiere que el rotor impulsado por un rotor vecino, que pasa a través de su región de velocidad crítica como se ve en los gráficos a continuación.
Turbomaquinaria y Bodé - Figura 21
De la misma forma, uno “jefe” del gráfico de Bodé sobre la amplitud del desplazamiento sin cambio de fase también puede provenir de la respuesta de un rotor vecino.
Estas situaciones se evalúan fácilmente revisando el rango de velocidad específico de las respuestas de amplitud y fase en los diagramas de Bodé de todos los rotores..
En casos como este, es muy útil tener un modelo de elementos finitos de los rotores para identificar las frecuencias naturales inherentes de cada rotor.
Turbomaquinaria y Bodé – Movimiento de oscilación del rotor – asimetría axial en la distribución de la excentricidad
A velocidades superiores a la primera velocidad crítica, una tendencia de amplitud ascendente sin ningún cambio de ángulo de fase notable es una indicación inmediata de asimetría axial en la distribución de excentricidad que genera el modo de oscilación/pivote como se ve en los gráficos a continuación.
Turbomaquinaria y Bodé - Figura 22
A veces, se observa una respuesta de amplitud adicional con un cambio de ángulo de fase superpuesto a la tendencia ascendente que indica una respuesta resonante en la segunda velocidad crítica, como se ve en el gráfico anterior (derecha).
Turbomaquinaria y Bodé – Excentricidad
Otra indicación común de excentricidad es cuando la amplitud por encima de la primera velocidad crítica es aproximadamente el doble de la medida por debajo de la primera velocidad crítica., o simplemente mantente drogado, pero algo plano como se ve en los siguientes gráficos.
Turbomaquinaria y Bodé - Figura 23
Esta es una función del rotor cambiando la posición de su eje de rotación cuando pasa por la región de velocidad crítica.. A velocidades más bajas, los sensores miden la cantidad directa de excentricidad del eje de masa que gira alrededor del eje de la geometría, indicando una amplitud igual a la excentricidad, mi. Cuando el rotor es lo suficientemente flexible, se puede medir una amplitud reducida en el diario, ya que el rotor puede principalmente “oscilar” o flexiona en tu plano medio, absorbiendo la mayor parte de la fuerza correspondiente.
A velocidades más altas, vienen los sensores “rotor completo” girando sobre el eje de inercia mientras continúa girando, tal que los sensores miden la excentricidad intrínseca, así como la medida de la excentricidad, indicando un rango de 2mi.
Turbomaquinaria y Bodé – Reducciones de amplitud por cambio de posición del eje de giro
A veces, también se observa una breve disminución de la amplitud antes o después del pico de velocidad crítica. Esta caída corresponde a un breve momento de autoequilibrado del rotor en la transición entre ejes de rotación.. Si es ante la crítica, indica que la respuesta resonante es dominante, y si visto despues de la critica, indica que el modo rígido impulsado por la excentricidad y la fuerza centrífuga es dominante como se ve en los gráficos a continuación.
Turbomaquinaria y Bodé - Figura 24