Analizador de vibraciones 12 – Funciones de dos canales a lo largo del tiempo
El tema específico tratado en un analizador de vibraciones 12, consta de las funciones de dos canales en el dominio del tiempo en un analizador de vibraciones, como se llevan a cabo Para la implementación de esta técnica se requiere la existencia de un sensor taquimétrico que informe permanentemente al equipo de medición sobre la velocidad de rotación del eje donde se están realizando las mediciones..
Cuando se produce Análisis de vibraciones, a través de la observación de los resultados de mantenimiento predictivo, para aprovechar todo el potencial de un analizador de vibraciones, necesitas entender cómo funciona. Por eso, aquí se presentan los conceptos de análisis de señales digitales, actualmente implementado en un analizador de vibraciones FFT, desde el punto de vista del usuario.
Comenzamos presentando las propiedades de la Transformada Rápida de Fourier. (FFT) en el que se basan los analizadores de vibraciones. En seguida, muestra cómo estas propiedades de FFT pueden causar algunas características indeseables en el análisis del espectro, como aliasing y breakouts (fuga). Haber presentado una dificultad potencial con la FFT, muestra qué soluciones se utilizan para hacer que los analizadores de vibraciones sean herramientas prácticas. El desarrollo de este conocimiento básico de las características de la FFT simplifica la obtención de buenos resultados con un analizador de vibraciones en una amplia gama de problemas de medición..
Aquí puede ver la gama de analizadores de vibración puesto a disposición por D4VIB.
- ¿Cuál es la relación entre tiempo y frecuencia?
- Cómo funciona el muestreo y el escaneo
- Qué es el aliasing y qué efectos tiene
- Cómo se usa y en qué consiste el zoom
- Cómo se utilizan las ventanas de forma de onda
- ¿Cuáles son los promedios para
- ¿Qué es el ancho de banda en tiempo real?
- Para que sirve el procesamiento de superposición ("superposición")
- Que es el seguimiento de pedidos
- Que es el análisis de envolvente
- Las funciones de dos canales en el dominio de la frecuencia
- Para que sirve Orbit
- ¿Cuáles son las funciones de un canal en el dominio del tiempo?
- En qué consiste el Cepstro
- ¿Cuáles son las unidades y escalas del espectro?
12.1. Monitorización de vibraciones con proximitores en máquinas con cojinetes de película de aceite
La señal horaria proporciona información importante y útil., como se llevan a cabo, esta información es limitada. En este tipo de movimiento, sobre cojinetes metálicos antifricción, donde la película de aceite amortigua las vibraciones en la carcasa del cojinete, la señal a tiempo, suministrado por un acelerómetro, no es el mas adecuado. Para monitorear este movimiento, sensores de desplazamiento que miden la vibración relativa entre el eje y la carcasa, son más adecuados, especialmente cuando se instala en pares.
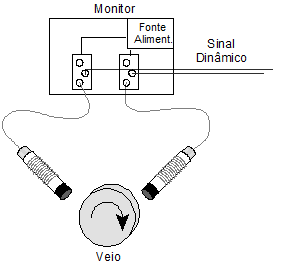
Analizador de vibraciones 12 – Figura 12.1 Monitorización de vibraciones con proximitores en máquinas con cojinetes de película de aceite
Con dos sensores de desplazamiento de vibración relativa (próximos) existen condiciones para conocer el movimiento del centro del eje en este plano. Esta información se puede presentar en dos señales horarias individuales, respectivamente a cada sensor, mas o ideal, es obtener una gráfica que represente las dos dimensiones del movimiento del eje. Este gráfico designa-se por órbita. La órbita representa la trayectoria desde el centro del eje en el plano de lectura del par de sensores de proximidad.. Los sensores están montados rígidamente en el bastidor de la máquina, junto a las áreas de apoyo del eje (aspectos). tan, la órbita representa la trayectoria del centro del eje en relación con la estructura de la máquina. Debido a la fácil interpretación y la cantidad de información que contiene el gráfico, el reloj de arena, reconciliado con un indicador de fase, también conocido como sensor de fase, es un gráfico eficaz para comprender los fenómenos físicos que ocurren en las máquinas rotativas.
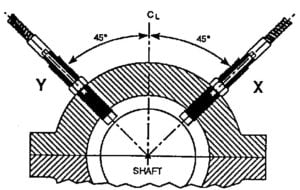
Analizador de vibraciones 12 – Figura 12.2 - Par de sensores de desplazamiento (próximos) montado sobre un rodamiento de película de aceite
12.2 Construcción de Orbit en el analizador de vibraciones.
La órbita combina los datos presentes en las formas de onda del par de sensores de proximidad., desfasado 90º, para crear un gráfico que muestre el movimiento del centro del eje en dos dimensiones. En la órbita de la figura 12.3 los sensores están configurados a 0 ° y 90 °.
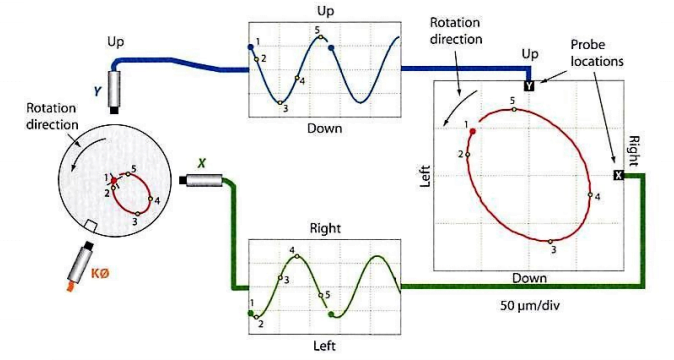
Analizador de vibraciones 12 – Figura 12.3 – Órbita resultante del par de sensores de desplazamiento XY en un analizador de vibraciones
En orbita, un punto está definido por un par de valores X e Y, que se obtiene a través de la información contenida en las señales en el tiempo. El centro del gráfico está definido por el promedio de los valores X e Y de las dos formas de onda.. Un impulso emitido por el sensor de fase actúa como referencia: el punto negro muestra la ubicación del centro del eje cuando se produce este impulso. Para completar la gráfica, la ubicación de los sensores y la dirección de rotación del eje se muestran en la Figura 12.3. Tenga en cuenta que la dirección de rotación del eje no se puede determinar a partir de la órbita sin información adicional.. La mejor forma de determinar la dirección de rotación es examinar la máquina.. Otra opción es utilizar órbitas en rotación lenta, que actúan en la dirección del movimiento de precesión. tan, sabiendo que la máquina está en rotación lenta, permite determinar el sentido de giro observando el sentido de precesión. La dirección de la precesión está determinada por la secuencia de espacio / punto negro de la órbita de la Figura 12.3. El punto de máxima amplitud de las señales de tiempo corresponde a la distancia mínima entre el sensor y la superficie del eje.
en la figura 12.3 ilustra la progresión del centro del eje alrededor de su órbita desde el punto 1 hacia 5. El punto 1 muestra la ubicación del centro del eje cuando el pulso del sensor de fase, esto es, cuando el primer vértice de la muesca producida en el eje pasa cerca del sensor sensor de fase. Los puntos 2 mi 4 referirse al punto más lejano y más cercano al sensor X (el pico mínimo y máximo en el gráfico de señal en el momento X). Del mismo modo, Los puntos 3 mi 5 referirse al punto más lejano y más cercano al sensor Y (el pico mínimo y máximo en el gráfico de señal en el momento Y).
en general, varios ciclos de vibración están representados en el gráfico. en la figura, un ciclo de vibración se representa en el gráfico de la señal a lo largo del tiempo, lo que significa que la órbita también tiene un ciclo. El pico positivo de la señal en el tiempo siempre representa la aproximación más cercana del eje al sensor asociado
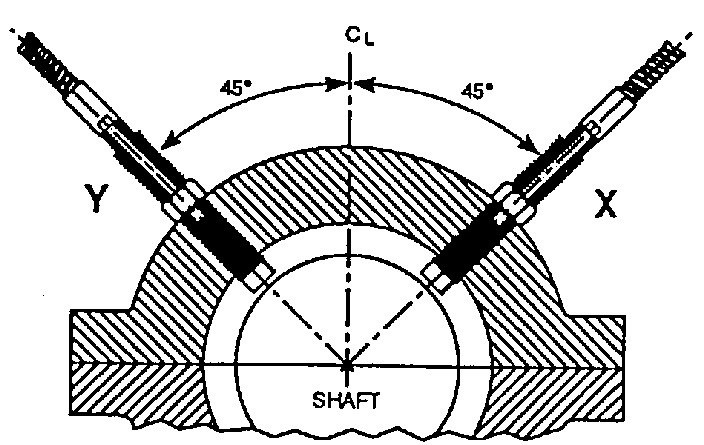
12.3 Orientación de montaje de los sensores
Las direcciones de montaje de los sensores se definen en relación con la dirección de referencia de la máquina.. El observador se colocará en la dirección axial del eje desde la máquina conductora hasta la máquina conducida.. Las ubicaciones de los sensores se indican al final de los gráficos., que proporciona una referencia visual uniforme, independientemente de la orientación de montaje de los sensores. en la figura 12.4, a órbita está orientada de modo que, quien la mire, ver como posicionado de acuerdo con la dirección de referencia, mirando a lo largo del eje de la máquina.
A Figura 12.4 muestra dos ejemplos de órbitas con diferentes orientaciones en el montaje de los sensores. En ambos casos, la órbita es la misma, solo la orientación de montaje es diferente. Tenga en cuenta que la indicación de los sensores en los gráficos representa la posición de montaje de estos.
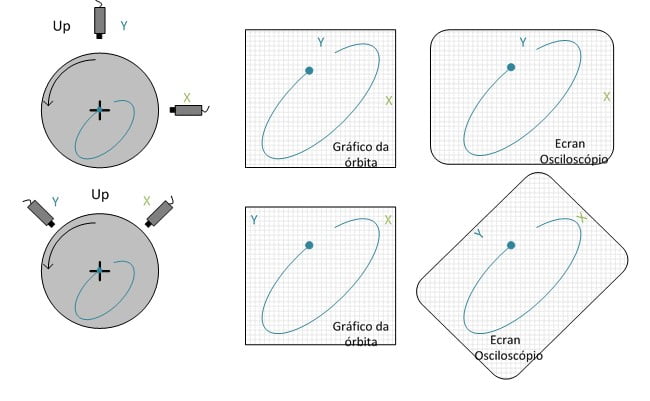
Analizador de vibraciones 12 – Figura 12.4 – Posición de los sensores y vistas respectivas
En el lado derecho de la figura 12.4, están presentes órbitas equivalentes de un osciloscopio. Porque los ejes X e Y del osciloscopio inferior no se corresponden con las posiciones de los sensores montados, el osciloscopio tendría que girarse físicamente 45 °, en sentido anti-horario (como sucede na Figura), para mostrar la órbita con la orientación correcta. En esta orientación, los ejes horizontal y vertical del osciloscopio coinciden con las orientaciones de los sensores. Al observar órbitas en un osciloscopio, los ejes X e Y de este, debe cumplir con las instrucciones de instalación de los sensores, o la órbita mostrada no corresponderá a la realidad.
Las órbitas filtradas no se construyen directamente a partir de la información indicada por el par de formas de onda.. La señal de tiempo recogida por los sensores se filtra a una determinada frecuencia y luego se utiliza para la construcción de la órbita filtrada..
12.4 El punto de referencia de velocidad de rotación y fase en el analizador de vibraciones- Sensor de fase (keyphasor)
La secuencia de espacio / punto de la órbita representa el efecto de la sensor de fase. Este impulso representa un evento en el tiempo que ocurre una vez por rotación del eje.. La señal proviene de un sensor de proximidad particular que se coloca radialmente en una posición axial diferente. El impulso de la sensor de fase le permite indicar la ubicación del centro del eje en el momento en que, la muesca producida en el eje para el propósito, pasa a través de este sensor durante la rotación. La secuencia de espacio / punto indica la dirección del incremento de tiempo.
La figura 12.5 muestra un eje giratorio. Durante el movimiento de rotación, el centro del eje también se mueve (movimiento de precesión) a lo largo de una trayectoria que definirá la órbita. Cuando el primer vértice de la muesca pasa el sensor de fase (posición 3 de la figura 12.5), el centro del eje coincide con el punto del sensor de fase de la órbita.

Analizador de vibraciones 12 – Figura 12.5 – Funcionamiento de sensor de fase
A la hora de inicio de sesión, el período entre dos impulsos del sensor de fase representa una rotación del eje. En el gráfico de órbita, el eje se mueve a lo largo del camino entre dos puntos del sensor de fase, durante la rotación. El punto de sensor de fase se agrega al gráfico cada vez que el eje completa una rotación. Si el gráfico incluye información para varias rotaciones, estará presente, en este gráfico, el número correspondiente de puntos sensor de fase. En órbitas filtradas el norteX la velocidad de rotación, me que norte es un entero, los puntos sucesivos se insertarán en el gráfico sensor de fase, que se superpondrán entre sí. El punto de sensor de fase agrega información que es útil para determinar la dirección instantánea del movimiento del eje y para estimar la fase absoluta, la frecuencia de vibración en órdenes de la velocidad de rotación y, por último, el modo de vibración del rotor.
12.5 Información presente en las órbitas en un analizador de vibraciones
El reloj, especialmente se dotada de sensor de fase, se puede utilizar para medir la amplitud de pico a pico en cualquier dirección radial, la frecuencia relativa de la vibración o la dirección de precesión. El perfil de la órbita puede proporcionar pistas importantes sobre el comportamiento de las máquinas., destacar cambios en la respuesta que tradicionalmente hubieran sido imperceptibles, y ayudar a identificar la ubicación donde puede ocurrir el problema en relación con la posición de los componentes de la máquina. La órbita muestra la trayectoria del eje en relación con la posición media., no hay información sobre la posición media del eje. Para obtener la posición media del eje, hay otros tipos de gráficos.
Las cartas de órbita se pueden crear desde la misma ubicación y a diferentes velocidades (datos transitorios), para mostrar la evolución de la vibración del eje al aumentar la velocidad. Por otro lado, Se pueden crear órbitas desde diferentes ubicaciones axiales y a la misma velocidad., para mostrar el modo de vibración del eje. La principal medida que se puede realizar en una órbita es la amplitud de pico a pico. (Figura 12.6). Hay dos aspectos fundamentales a la hora de utilizar esta medida. primero, La medición de pico a pico debe realizarse en paralelo al eje de medición del sensor.. Simplemente mida vertical u horizontalmente, en este caso, produciría resultados diferentes e incorrectos. Segundo, La medición de pico a pico se realiza entre tangentes que también son perpendiculares al eje de medición del sensor.
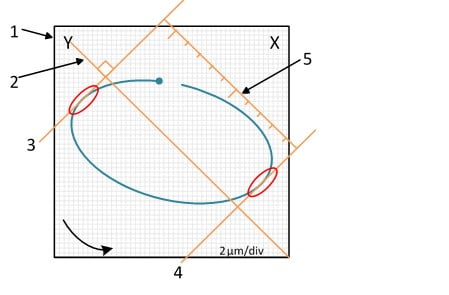
Analizador de vibraciones 12 – Figura 12.6 – Medida de la amplitud pico a pico de la órbita.
La órbita se utiliza para determinar la dirección de la precesión del eje.. El punto de sensor de fase indica la dirección del aumento del tiempo, sentido que será la precesión de la vena. Una vez determinado, la dirección de la precesión se puede comparar con la dirección de rotación para confirmar que nos enfrentamos a la precesión para a frente (coincidencia de sentido de rotación y precesión) o para atrás (sentido de precesión contrario a la rotación).
En órbitas complejas, el eje se puede precesar hacia adelante en una parte y precesión hacia atrás durante el resto de la órbita. Observe cómo los bucles internos de las órbitas 1 / 2X la velocidad de rotación de la figura 12.7 mantener la precesión adelante, mientras que los bucles externos muestran una precesión hacia atrás.
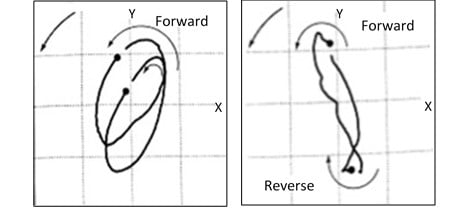
Analizador de vibraciones 12 – Figura 12.7 – Sentido de precesión de las órbitas.
La órbita filtrada se puede utilizar para estimar la fase absoluta de los dos componentes de la señal.. Esta estimación será más precisa para órbitas circulares., y menos precisa para órbitas elípticas (Figura 12.8) debido a la velocidad angular constante de la órbita circular a lo largo de su trayectoria (intervalos de tiempo iguales y ángulos similares entre puntos). En órbitas elípticas, la velocidad angular de la órbita no es constante (intervalos de tiempo iguales, pero diferentes ángulos entre puntos). Como la fase es una medida de tiempo, estas variaciones en la velocidad angular provocan imprecisiones al intentar estimar la fase con respecto a cada sensor.
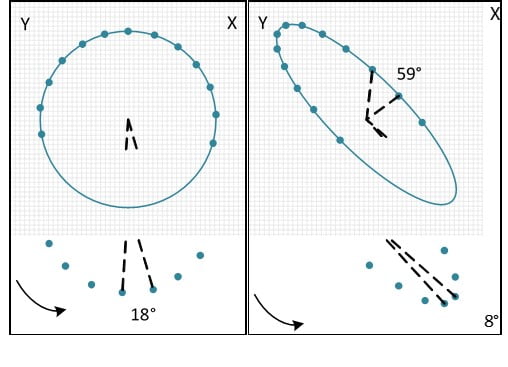
Analizador de vibraciones 12 – Figura 12.8 – Dificultades en la fase de lectura en órbitas
A Figura 12.9 ilustra un conjunto de órbitas 1X la velocidad de rotación a la que los puntos de la sensor de fase indicar la ubicación del centro del husillo, en cada plan de medición, en el instante en que ocurre el impulso. Estos puntos se pueden unir mediante una línea., para obtener una estimación de cuál será el comportamiento del eje a lo largo de su longitud. El movimiento del eje ocurre a diferentes velocidades en diferentes partes de la órbita.. Sin indicaciones adicionales, la ubicación del eje no se conoce en un momento dado. El impulso de la sensor de fase es la solucion, proporcionar la referencia a tiempo para un punto, en particular, en cada órbita.
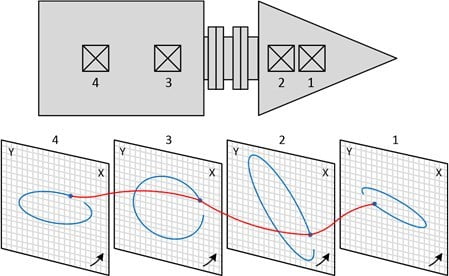
Analizador de vibraciones 12 – Figura 12.9 – En cada órbita, el impulso de sensor de fase muestra la ubicación de ese punto en el eje
12.5 Presentación de la órbita asociada a las formas de onda de la señal a lo largo del tiempo en un analizador de vibraciones
Este tipo de gráfico combina la órbita con dos formas de onda de la señal en el tiempo.. La forma de onda resultante de la lectura Y se muestra sobre la X, ambos a la derecha de la órbita (Figura 12.10). El gráfico contiene información sobre la dirección de rotación., la velocidad, la escala utilizada en órbita y la escala de tiempo presente en las formas de onda. La figura es un ejemplo de cómo utilizar estos gráficos para localizar un defecto en la superficie del eje.. Esta órbita tiene un perfil que revela la existencia de daños en la superficie del eje.. ordinariamente, los defectos superficiales se reflejan en picos que apuntan en la dirección de los sensores. Las formas de onda ayudan a aclarar el período entre estos picos y permiten determinar la ubicación angular del daño en la superficie.
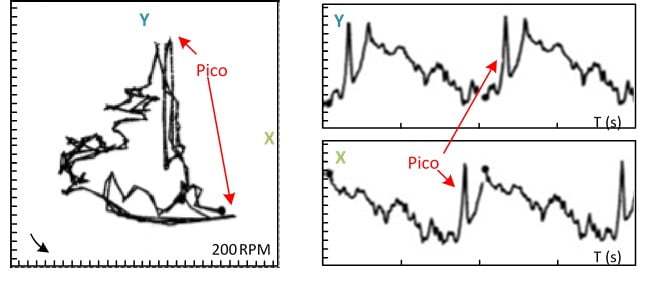
Analizador de vibraciones 12 – Figura 12.10 – Órbita asociada con formas de onda Y y X
Recuerde que los picos positivos de la forma de onda representan el paso del eje junto al sensor y que, la ubicación de montaje de los sensores, se muestra en el gráfico de órbita. El impulso de la sensor de fase representa el mismo instante en todos los gráficos. Esta combinación de gráficos permite correlacionar la información presente en la órbita con la información de las formas de onda..