análisis de vibraciones en motores eléctricos
En este artículo, Se realiza una introducción al análisis de vibraciones en motores eléctricos.. Se explican las diversas fuentes de fuerzas eléctricas y mecánicas en un motor de inducción eléctrico.. También se explica cómo reacciona o transmite el motor esta fuerza y cómo se puede amplificar o minimizar esta fuerza..
Cuando ocurre un problema de vibración, Es importante utilizar un enfoque sistemático y analítico para resolver el problema.. Esto incluye la realización de las pruebas diagnósticas adecuadas.. El proceso comienza enumerando todas las causas posibles para la frecuencia de vibración específica identificada y cualquier variación bajo diferentes condiciones de operación.. En seguida, las causas incorrectas se eliminan una por una hasta que lo único que queda es la verdadera fuente del problema, que se pueda eliminar eficientemente.
El motor eléctrico de inducción trifásico es el accionamiento más común y una avería imprevista en este tipo de máquinas puede tener consecuencias económicas muy graves.. Esto significa que hoy en día es a menudo el uso de mantenimiento preventivo basado en el enfoque de tiempo que el mantenimiento de estas máquinas. A medida que el tiempo medio entre fallos de este tipo de máquina de ocho años en la industria petroquímica ( para un trabajo 8760 horas / año) es común el uso de muy-intervalos más cortos. Sin embargo, también son habituales las instalaciones donde el mantenimiento preventivo sólo se realiza en base al conocimiento del estado de funcionamiento de la máquina.. Este último enfoque, debido a la económica y se inserta también se necesita en las filosofías modernas de mantenimiento, También resulta del hecho de que los responsables de mantenimiento de las instalaciones donde se practica este enfoque, sentirse cómodo con las técnicas de monitoreo de condición más común.
1. ANÁLISIS DE VIBRACIONES EN MOTORES ELÉCTRICOS – FUENTES DE VIBRACIÓN
Hay muchas fuerzas eléctricas y mecánicas presentes en los motores de inducción que pueden provocar vibraciones.. Además, La interacción de estas diversas fuerzas hace que sea difícil identificar la causa raíz.. En las siguientes secciones, Se discuten los principales mecanismos..
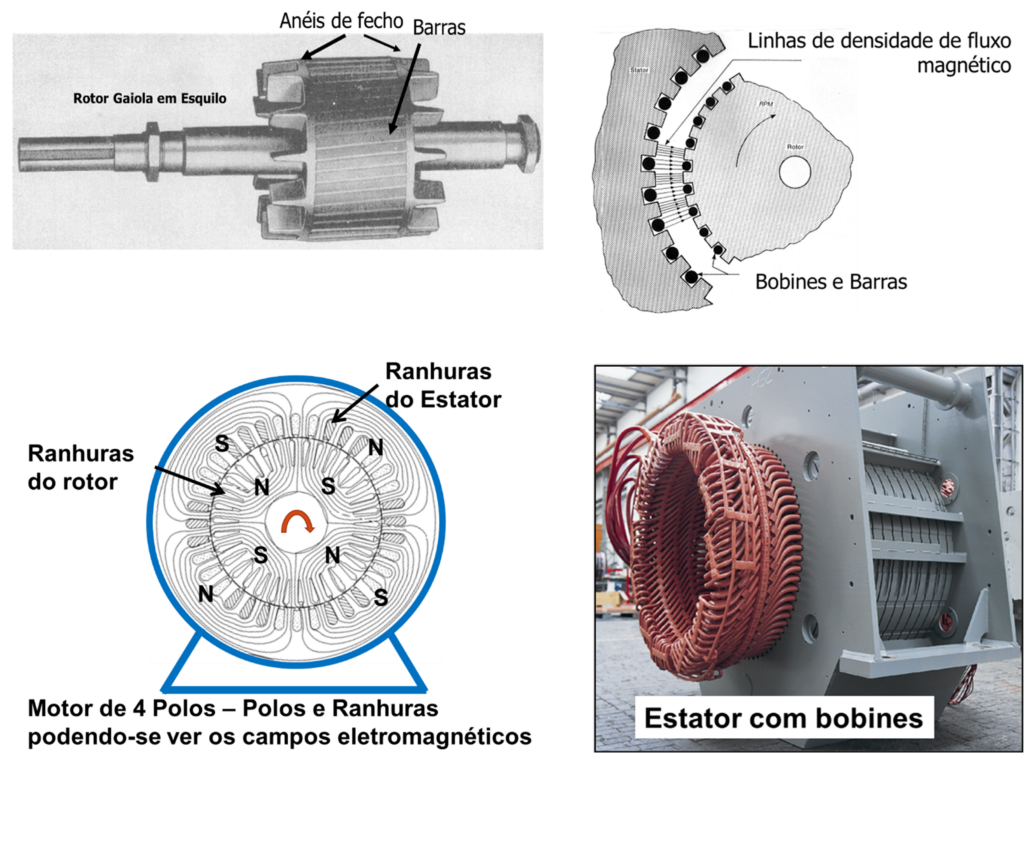
Figura 1 – Estator y rotor
1.1 Análisis de vibraciones en motores eléctricos y vibración al doble de la frecuencia de la red. (100 hz)
Hay muchas fuerzas e interacciones diferentes que resultan de la fuente de energía y de las interacciones entre el estator y el rotor., como se puede observar en la Fig.. 1. La fuente de energía es un voltaje sinusoidal que varía de un pico de voltaje positivo a uno negativo en cada ciclo.. muchos problemas diferentes, de naturaleza eléctrica o mecánica, Puede causar vibraciones en frecuencias iguales o similares.. Es necesario mirar con atención para diferenciar las verdaderas fuentes de vibración..
Una fuente de alimentación produce una fuerza de atracción electromagnética entre el estator y el rotor., que es máximo cuando la corriente magnetizante que fluye en el estator es máxima, positivo o negativo, en ese instante de tiempo. A consecuencia, Habrá dos fuerzas máximas durante cada ciclo de la onda de voltaje o corriente que se reducirán a cero cuando la corriente fundamental y la onda de flujo pasen por cero., como se muestra en la figura. 2. Esto dará como resultado una frecuencia de vibración igual al doble de la frecuencia de la red..
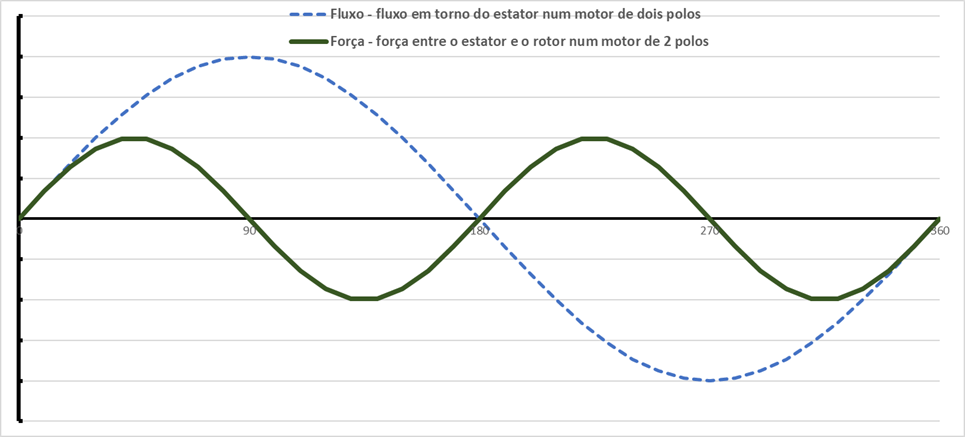
Figura 2. Onda de flujo de un período y onda de fuerza magnética.
Esta vibración específica es extremadamente sensible a la planitud de la base del motor., la rigidez de la estructura y la base y la consistencia del entrehierro entre el estator y el rotor, alrededor del estator. También está influenciado por la excentricidad del rotor..
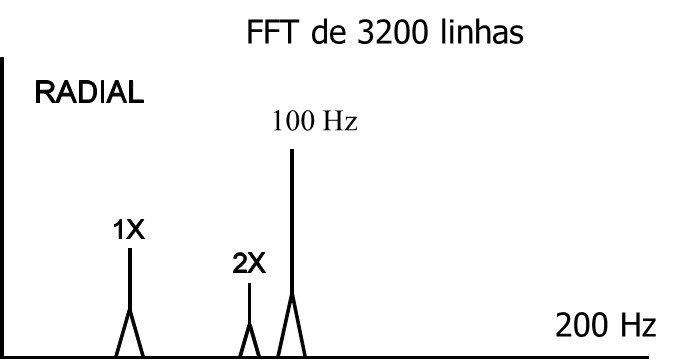
Figura 3 – esquema de espectro con componente a 100Hz
1.1.1 análisis de vibraciones en motores eléctricos está en influencia de la carga en el componente a 100 hz
Algunas personas parten de la premisa incorrecta de que la vibración del doble de la frecuencia de la red varía con la carga.. Esta idea errónea proviene de la creencia de que la excitación de la vibración de frecuencia de dos líneas se debe a un campo magnético generado por la corriente en la bobina del estator que varía con la carga y crea una fuerza magnética que varía con el cuadrado de la corriente en el estator.. En realidad, Los amperios-vuelta del estator y del rotor tienden a equilibrarse entre sí., con excepción de los amperios-vueltas de excitación. Para explicar esto a quienes no están familiarizados con la teoría del motor eléctrico., Los amperios-vueltas de excitación son creados por la corriente sin carga del motor.. Esto establece el campo magnético en el motor necesario para generar un campo electromagnético de retorno aproximadamente igual al voltaje aplicado.. A medida que se aplica carga al motor, Las corrientes del estator y del rotor aumentan juntas y se equilibran entre sí., por lo tanto, No hay cambios significativos en el flujo.. Esto significa que las fuerzas magnéticas básicas son independientes de la corriente de carga y son prácticamente las mismas sin carga o con carga completa.. Consecuentemente, el componente principal de la vibración al doble de la frecuencia de la red (100 hz), que se crea por una atracción magnética desequilibrada debido a la asimetría del entrehierro, no cambia con la carga.
1.1.2 análisis de vibraciones en motores eléctricos soy yoondulación y deslizamiento de amplitud
en motores de 2 polos, El nivel de vibración del doble de la frecuencia de la red parecerá modularse con el tiempo debido a su proximidad a la vibración del doble de la rotación.. problemas del motor, como la fricción, piezas sueltas, Un eje doblado o cojinetes elípticos pueden provocar vibraciones en 2 veces la frecuencia de rotación. Debido a su proximidad en frecuencia a la vibración del doble de la frecuencia de la red., los dos niveles se suman cuando están en fase y se restan cuando están fuera de fase y luego se vuelven a sumar cuando vuelven a estar en fase. Esta modulación se repite a una frecuencia de 2 veces el deslizamiento en los motores 2 polos. incluso en vacío, vibración de doble rotación en motores 2 por variará de 100 Hz por deslizamiento. Dado que hay cierto deslizamiento en los motores de inducción., aunque pequeño en vacío, puede tardar 5 una 15 minutos para deslizar una rotación.
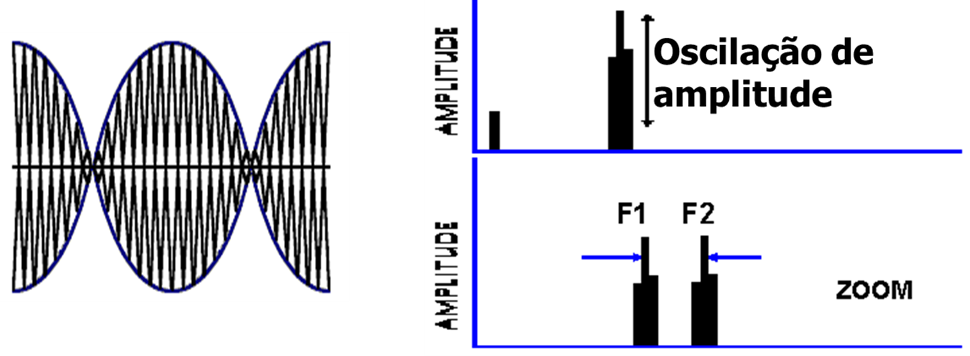
Figura 4 – Oscilación del nivel de vibración debido a dos componentes de frecuencia con valores muy cercanos
Para aquellos que no están familiarizados con el término deslizamiento., Hay un campo giratorio alrededor del estator con el que el rotor intenta mantenerse en fase., pero el rotor se retrasará con respecto al campo del estator en un cierto número de revoluciones por minuto, dependiendo de la carga. Cuanto mayor sea la carga, cuanto mayor sea el deslizamiento. El deslizamiento suele ser 1% velocidad nominal a plena carga, y disminuye hasta cerca de cero deslizamiento sin carga. Dado que los niveles de vibración no son constantes, para medir la vibración, A menudo es necesario realizar lo que se conoce como prueba de modulación.. En una prueba de vibración de modulación, el motor puede funcionar durante un período de 10 o 15 minutos y la vibración se registra continuamente para permitir que se establezcan el máximo y el mínimo..
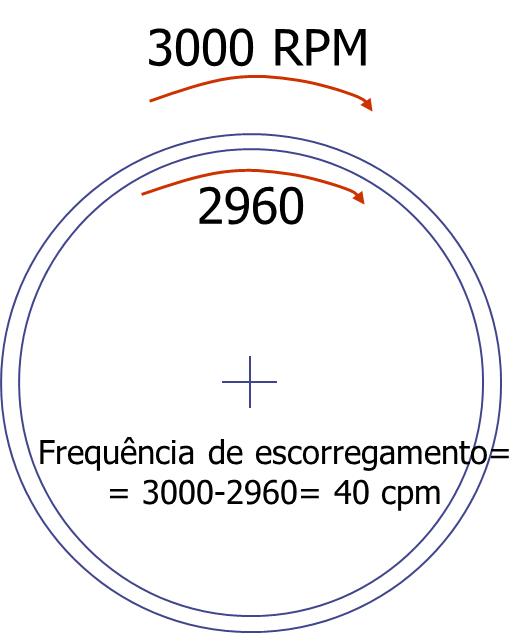
Figura 5 - el deslizamiento
1.1.3 Estator elíptico debido al flujo electromagnético.
para motores de 2 polos, La fuerza electromecánica intentará desviar el estator en forma elíptica.. La principal resistencia al movimiento es la rigidez del hierro del núcleo del rotor y la rigidez del marco alrededor del núcleo del estator., que restringe el movimiento del núcleo. Nos motores de 4 polos, la distancia entre los nodos es sólo 45 grados mecánicos, la mitad de lo que pasa en los motores 2 polos, haciendo así el núcleo del estator 4 Polos mucho más rígidos al movimiento., lo que resulta en una vibración al doble de la frecuencia de la red, menor. Cálculos realizados en un motor típico de dos polos. 1000 HP un 60 Hz muestran una vibración de 120 Hz en el diámetro exterior del núcleo del estator de aproximadamente 3 mm/s por segundo, Velocidad de vibración medida en la carcasa en mm/s rms, mientras que los valores para un motor de cuatro polos del mismo tamaño son sólo aproximadamente 0,5 una 0,7 mm / s, entre un sexto y un cuarto de esta cantidad. Esta vibración al doble de la frecuencia de la red se transmite a través del bastidor del motor hasta las carcasas de los cojinetes., donde su amplitud se reduce ligeramente.
1.1.4 análisis de vibraciones en motores eléctricos e fentrehierro asimétrico (excentricidad estática)
Los niveles de vibración a 100 Los Hz pueden aumentar significativamente cuando el entrehierro no es simétrico entre el estator y el rotor., como se muestra en la figura.
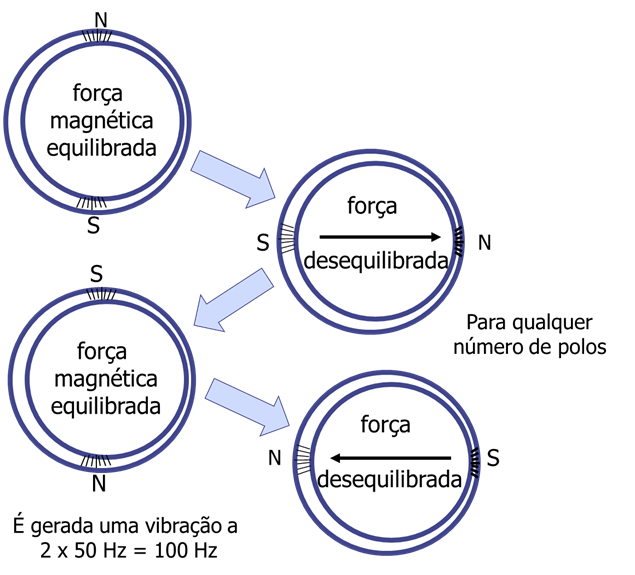
Figura 6. Entrehierro asimétrico alrededor del rotor.
Esta condición particular hará que la fuerza sea mayor en la dirección del entrehierro más pequeño.. O sea, Habrá una atracción magnética desequilibrada en la dirección del entrehierro mínimo..
Fuerza ≈B2/re
Donde:
B= Densidad de flujo
d= distancia del entrehierro
Lo que importa aquí es que el estator no sólo es arrastrado en una dirección, pero también el rotor se tira en la dirección opuesta, hacia el lado que tiene el espacio de aire mínimo. Esto provoca una mayor vibración del eje., ¿Qué es más perjudicial para la vida?. El diámetro exterior del rotor es concéntrico con el eje de rotación., esto hace que la fuerza permanezca máxima en la dirección del entrehierro mínimo.
La “pata cocha” o espacios en los rodamientos pueden causar excentricidad estática..
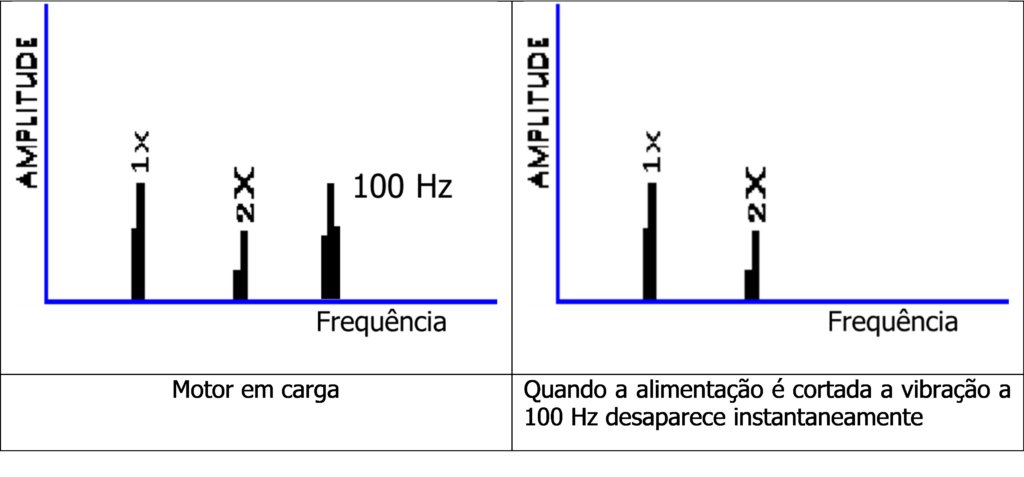
Figura 8 – ¿Qué se puede ver en el espectro cuando se corta la potencia del motor?. Los componentes de origen eléctrico desaparecen instantáneamente..
1.2 análisis de vibraciones en motores eléctricos e avvibración de frecuencia de red (50 hz)
Aunque no es tan frecuente como la vibración de frecuencia de 100 hz, puede haber vibraciones en la frecuencia de la red. Los impulsos magnéticos desequilibrados pueden provocar vibraciones en 50 hz, así como en la vibración habitual del doble de la frecuencia de la red.. Si el rotor o estator se mueve de un lado a otro, el punto mínimo del entrehierro puede moverse de un lado del motor al otro. Cuando la frecuencia de este movimiento coincide con la frecuencia de la onda de flujo en movimiento, La tracción magnética desequilibrada se desplaza de un lado a otro con un punto de separación mínimo., lo que produce vibraciones en la frecuencia de la red. esta vibración a 50 Los Hz suelen ser muy pequeños o inexistentes., pero si el sistema del estator o del rotor tiene una resonancia a la frecuencia de la red, o cerca de ella, la vibración puede ser genial.
1.3 análisis de vibraciones en motores eléctricos e avvibración a 1 x RPM - Eléctrico (rotor excéntrico – excentricidad dinámica)
un rotor excéntrico, lo que significa que el diámetro exterior del núcleo del rotor no es concéntrico con los muñones del rodamiento., crea un punto mínimo de espacio de aire, que gira con el rotor, a la frecuencia de rotación. Asociado a este hecho, Habrá una fuerza magnética desequilibrada actuando en el punto mínimo del entrehierro., Dado que la fuerza que actúa sobre el entrehierro mínimo es mayor que la fuerza sobre el entrehierro máximo., como se ilustra en la figura. Esta fuerza neta de desequilibrio girará a la frecuencia de rotación, con el entrehierro mínimo, causando vibración a la frecuencia de rotación.
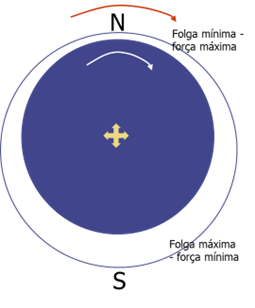
Figura 9 – rotor excéntrico
El flujo que causa la fuerza magnética es la onda de flujo electromagnético., que gira alrededor del estator a la velocidad síncrona del motor. El rotor intenta seguir la onda de flujo electromagnético giratorio del estator., pero el rotor se desliza detrás del campo del estator según sea necesario para crear el par necesario para la carga.. Cuando el punto alto del rotor (punto mínimo del entrehierro) se alinea con el punto más alto (máximo) del flujo del estator, La fuerza será máxima y luego disminuirá., volviéndose pequeño por debajo de un punto de flujo mínimo. tan, Se crea una fuerza de desequilibrio que gira a velocidad de rotación y cambia de magnitud al deslizarse.. El resultado es una vibración a la vez que la velocidad de rotación., amplitud modulada por deslizamiento x el número de polos. Esta condición ocurre sin carga o con carga completa.. vacío, La frecuencia se acerca a la velocidad sincrónica y puede tener un período de modulación de 5 una 15 minutos. A plena carga, la frecuencia de modulación en CPM será igual al número de revoluciones por minuto multiplicado por el número de polos. El deslizamiento es igual a la velocidad sincrónica. (50 hz) menos velocidad de carga completa, típicamente 1% de rpm nominales.
Por ejemplo, un motor 2 polos con una velocidad de carga total de 3564 rpm un 60 Hz tendrá un deslizamiento de 3600-3564 = 36 ciclos por minuto (1% corredizo) y dará como resultado una frecuencia de modulación de 2*36 = 72 ciclos por minuto.
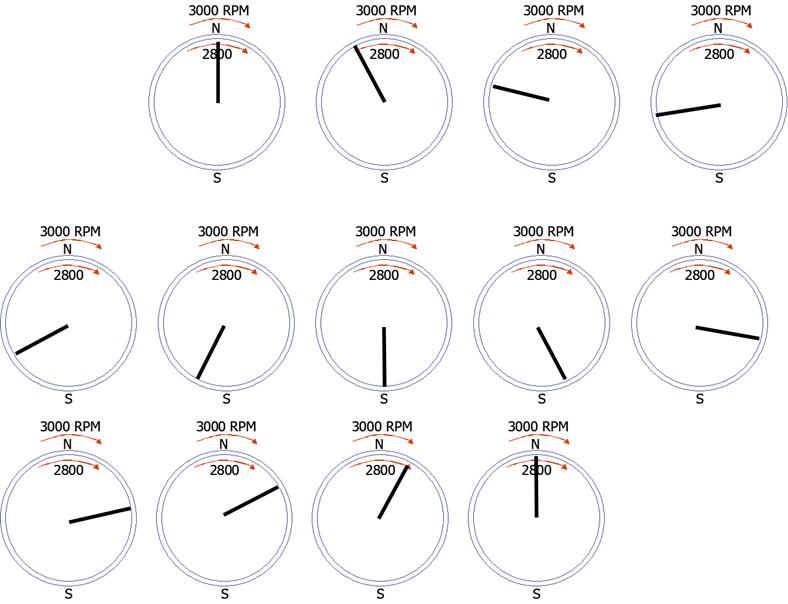
Figura 10 – En un motor de dos polos, una excentricidad dinámica en el rotor, se manifiesta al doble de la frecuencia de deslizamiento
La amplitud de la oscilación del nivel de vibración depende de la carga..
- Oscilaciones grandes y rápidas bajo carga: motor rugiendo;
- Pequeñas oscilaciones lentas en vacío. – un ciclo de deslizamiento puede tardar varios minutos.
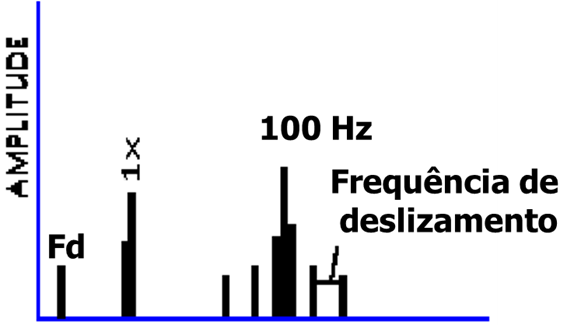
Figura 11 – Un rotor excéntrico provoca un entrehierro variable. (giratorio) ¿Qué causa las vibraciones pulsantes?.
A menudo se necesita mucha resolución para separar los 100 Hz de armónicos de velocidad de rotación.
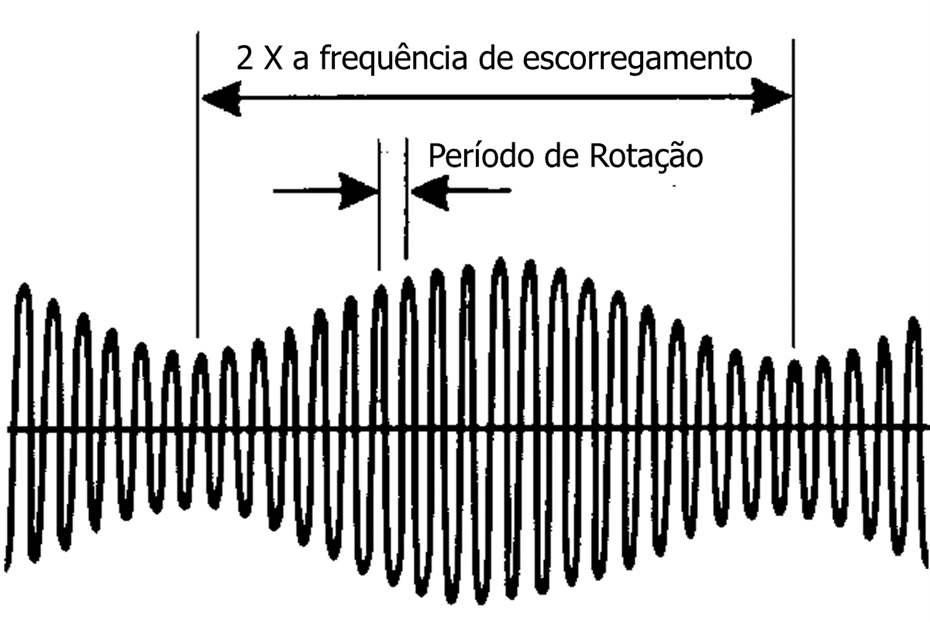
Figura 12 – La onda con la oscilación del nivel de vibraciones.. En este caso la velocidad de rotación está modulada por 2 x la frecuencia de deslizamiento.
barra del rotor rota (o punto de alta resistencia)
Si hay una barra del rotor rota o una junta de soldadura abierta, No fluirá corriente en la barra del rotor., como se muestra en la figura. A consecuencia, el campo del rotor alrededor de esa barra en particular no existirá. Consecuentemente, La fuerza aplicada en ese lado del rotor sería diferente de la aplicada en el otro lado del rotor., creando nuevamente una fuerza magnética desequilibrada que gira a velocidad de rotación y modula a una frecuencia igual a la frecuencia de deslizamiento multiplicada por el número de polos..

Figura 13 – barra del rotor rota
Si una de las barras del rotor tiene una resistencia diferente, puede ocurrir un fenómeno similar (como en el caso de una barra del rotor rota). Cabe señalar que esta es una de las pocas condiciones que no se pueden observar en el vacío.. Sin embargo, Hay un fenómeno adicional asociado con esta condición que se puede observar sin carga después de que el motor se haya calentado a la temperatura de carga máxima mediante cualquier método que genere corriente en el rotor..
Estos métodos incluyen:
- Prueba de carga completa acoplada,
- Observación del calentamiento del motor.,
- Múltiples aceleraciones o calentamiento., bloqueando el rotor y aplicando voltaje.
Además, Las barras rotas del rotor o un cambio en la resistividad de la barra causarán un calentamiento localizado.. este, a su momento, puede deformar el rotor, creando un rotor excéntrico, provocando un desequilibrio de masa del rotor y una mayor atracción magnética desequilibrada, creando así una vibración una vez alta y algunas vibraciones mínimas dos veces en la frecuencia de la red..
1.4 análisis de vibraciones en motores eléctricos e avVibración a la frecuencia de paso de las barras del rotor.
Vibración magnética de alta frecuencia., relacionado con la carga, en o cerca de la frecuencia de paso de las ranuras del rotor, se genera en el estator del motor, cuando se induce corriente en las barras del rotor bajo carga. La magnitud de esta vibración varía con la carga., aumentando a medida que aumenta la carga. La corriente eléctrica en las barras crea un campo magnético alrededor de las barras que aplica una fuerza de atracción a los orificios del estator.. Estas fuerzas radiales y tangenciales que se aplican a los fosos del estator, como se muestra en la figura, crear vibraciones en el núcleo del estator y las fosas.
Esta fuente de vibración tiene una frecuencia mucho más alta que las frecuencias normalmente medidas durante las pruebas de vibración normales.. Debido a las frecuencias extremadamente altas, Incluso desplazamientos muy pequeños pueden provocar altas velocidades de vibración., si el rango de frecuencias medidas incluye estas frecuencias. Aunque estos niveles y frecuencias se pueden captar en el bastidor del motor y en las carcasas de los cojinetes, No se observarán niveles significativos de vibración a estas frecuencias más altas entre el eje y la carcasa del rodamiento., donde pueden ser dañinos. Por esta razón, Los requisitos de especificación de prueba de vibración normalmente no requieren que estas frecuencias se incluyan en la vibración general..
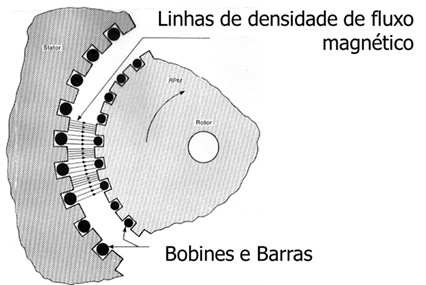
Figura 14 – Campo magnético alrededor de la barra del rotor y fuerza resultante en los fosos del estator.
Dado que la vibración en la frecuencia de paso de la barra del rotor ocurre a una frecuencia alta, el nivel de velocidad de vibración puede ser significativo, pero el efecto sobre la confiabilidad del motor es insignificante. Esto teniendo en cuenta el estrés mecánico que se origina en el motor como consecuencia de la vibración.. Por ejemplo, Supongamos que un motor de dos polos exhibe una vibración en 2800 Hz debido a la frecuencia de paso de la barra del rotor más una banda lateral de 120 hz:
| velocidad, (mm / s) | 2,5 | 12,5 |
| desplazamiento (micrón) | 0,28 | 1,45 |
| Tensión de hierro del núcleo del estator | 0,2 N/mm2 | 1 N/mm2 |
| Voltaje del hierro del pozo del estator | 0,34 N/mm2 | 1,7 N/mm2 |
La resistencia a la fatiga típica del núcleo de hierro es 240 N/mm2. Se pueden calcular niveles de voltaje de remolque similares para todas las partes del motor. (incluyendo los devanados del estator). Además, El espesor mínimo típico de la película varía entre 25 mi 38 micrón. Dado que sólo se puede observar un pequeño desplazamiento, de 0,28 una 1,45 micrón, como se ha mencionado más arriba, Esta vibración no tendrá un efecto adverso en el rendimiento del rodamiento..
Las frecuencias de las ranuras del rotor y las bandas laterales están en el rango de frecuencia normalmente relacionado con el ruido más que con el rendimiento de vibración., y se tienen en cuenta en las predicciones de ruido durante el diseño del motor.. De facto, Estos componentes de potencia son las principales fuentes de ruido de alta frecuencia en las máquinas eléctricas., quien ha estado, desde hace algún tiempo, sujeto a regulaciones y límites de ruido. La experiencia ha demostrado que, cuando el ruido está dentro de rangos normales o incluso altos, no hay daño estructural asociado. El significado de estas vibraciones de alta frecuencia se distorsiona cuando se toman medidas a la velocidad y luego se aplican límites basados en la experiencia con vibraciones de baja frecuencia..
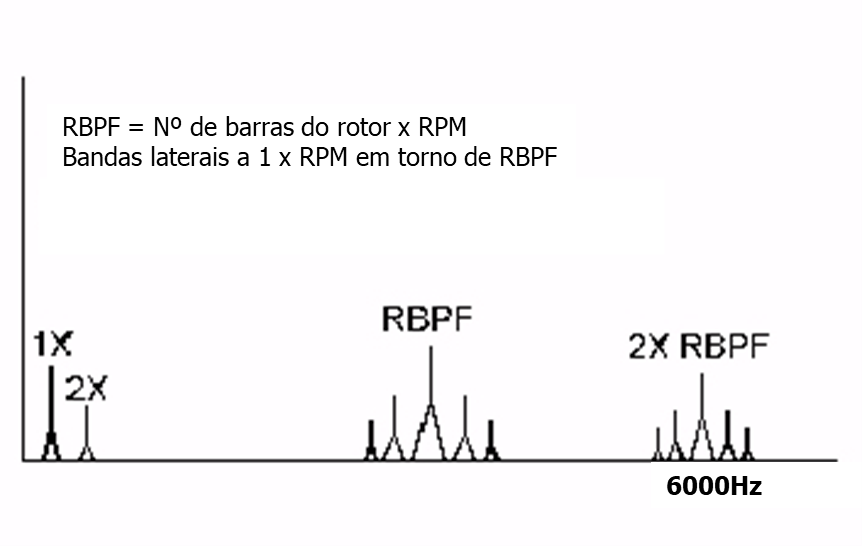
Figura 15 -La falta de uniformidad del entrehierro también provoca una vibración con una frecuencia igual a la frecuencia de paso de la barra RBPF., con bandas laterales a 1xRPM del rotor.
1.5 Frecuencias de fuerza electromagnética relacionadas con la carga.
Las frecuencias de las fuerzas magnéticas relacionadas con la carga aplicadas a los fosos del estator y al núcleo del estator son iguales a la frecuencia de paso de las barras del rotor más las bandas laterales para + o – 2F, 4F, 6fe 8fHz, donde f es 50 hz (frecuencia de red). Se genera una fuerza magnética a la frecuencia de paso de la ranura del rotor. (FQR), que es la velocidad del motor en revoluciones por segundo multiplicada por el número de ranuras del rotor, como se muestra en.
FQR = RPM*No / 50 hz
Donde:
FQR – frecuencia de paso de la ranura del rotor
Nr = número de ranuras del rotor
Para el típico motor bipolar de 3570 rpmcom 45 ranuras en el rotor en el ejemplo anterior, fqr = 2680 hz.
Las bandas laterales se crean cuando se modula la amplitud de esta fuerza.’ el doble de la frecuencia de la fuente de alimentación. En un sistema de 50 hz, la modulación de 100 Hz produce las bandas laterales., dando frecuencias de excitación FQR, FQR + 100, FQR – 100, FQR + 200, FQR – 200 hz, etc..
Las fuerzas aplicadas a las ranuras del estator no se distribuyen uniformemente en todas las ranuras en ningún instante de tiempo.; Se aplican con diferentes magnitudes en diferentes pozos., dependiendo de la posición relativa de los fosos del rotor y del estator. Esto da como resultado ondas de fuerza a lo largo de la circunferencia del estator.. La forma de estas ondas de fuerza magnética es el resultado de la diferencia entre el número de ranuras del rotor y del estator., Como se muestra abajo.
m = (norteS — norter) +/-kp
Donde:
norteS = número de ranuras del estator
norter = número de ranuras del rotor
P = número de polos
K = todos los números enteros 0, 1, 3, etc..
análisis de vibraciones en motores eléctricos mi como fFormas de vibración y frecuencias naturales de vibración del estator.
Dependiendo del patrón modal y las frecuencias de fuerza de excitación., como se describió anteriormente, El estator vibrará en uno o más de sus modos de vibración de flexión.. Cada una de las formas modales tiene su frecuencia natural asociada.. El núcleo puede verse un poco influenciado por la estructura del estator., pero en el análisis la estructura generalmente se descuida, tanto por la complejidad como porque el efecto en los modos de frecuencia más alta es mínimo.
Comprender la frecuencia natural de la armadura del estator en un modo de vibración determinado., El núcleo se puede representar como una viga., que simplemente se apoya en ambos extremos y se dobla entre los extremos debido a las fuerzas aplicadas a la viga. La longitud del haz es igual al perímetro del diámetro promedio del núcleo del estator para la mitad de la longitud de onda del modo..
Si la frecuencia natural del núcleo del estator está cerca de la frecuencia forzada, el resultado será un alto nivel de vibración. Los modos de vibración más bajos pueden producir frecuencias resonantes cercanas a las frecuencias forzadas primarias..
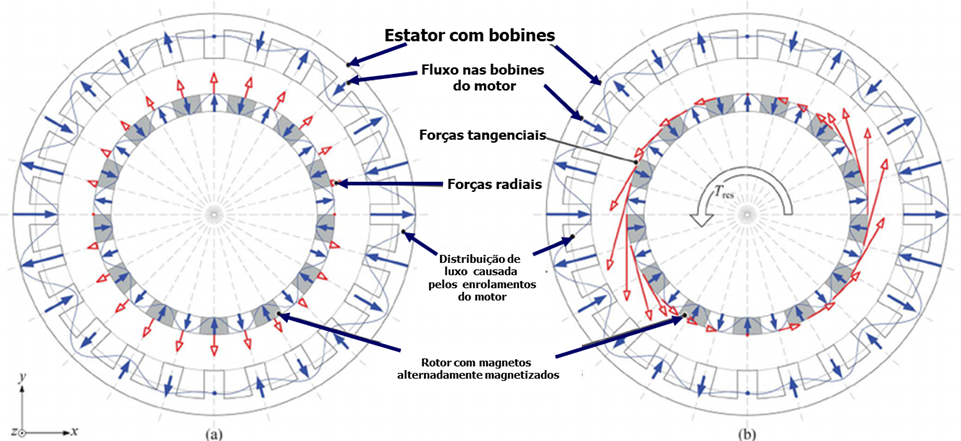
Figura 16 – Fuerzas en los fosos del estator y del rotor.
También se debe observar la frecuencia natural de las caídas del estator.. Las fuerzas tangenciales aplicadas a las picaduras pueden provocar una condición de resonancia de las picaduras.. El foso es una viga empotrada sostenida en la raíz por el núcleo.. La frecuencia natural de la viga en voladizo es función de la longitud y el ancho de la viga.. Un haz más largo y estrecho producirá una frecuencia natural más baja..
La fuerza aplicada a cada pozo produce un desplazamiento del pozo y del núcleo.. El offset tendrá mayor amplificación cuanto más cerca esté la frecuencia forzada de la frecuencia natural del núcleo o pit.:

Donde:
F es la frecuencia de la red
Fla es la frecuencia natural.
esta vibra es, a veces, Asociado incorrectamente con barras de rotor sueltas., pero hay razones por las que las barras del rotor sueltas no crean vibración de frecuencia de paso en la ranura del rotor.
En primer lugar, en la mayoría de los motores más grandes, Las fuerzas centrífugas son tan grandes que el único momento en que la barra del rotor puede moverse es cuando el rotor está acelerando.. este, por sí mismo, puede ser un problema grave, ya que la causa número uno de falla al conectar la barra del rotor al conector en la parte superior, es el movimiento de la barra del rotor como resultado de múltiples reinicios de una carga de alta inercia. pero, El único aumento en la vibración de velocidad debido a las barras del rotor sueltas se debería a un desplazamiento en la jaula del rotor que causa un desequilibrio mecánico a una RPM..
¿Por qué es importante al observar la variación de velocidad en una máquina?, mirando cualquier barra del rotor, la barra en sí nunca está sujeta a una fuerza en la frecuencia de paso de la ranura del rotor. Las barras giran a velocidad de rotación.. Hay un campo alterno en el rotor., que tiene una frecuencia cercana a cero ciclos por minuto sin carga, luego aumenta a una frecuencia igual a la frecuencia de deslizamiento multiplicada por el número de polos a plena carga. en un motor de 2 polos, típicamente 2 (polos) veces 36 rpm (resbalón típico) o 72 ciclos por minuto. Para facilitar la comprensión, Considere un punto o una barra en el rotor de un motor diesel. 2 polos, y que este punto está girando en 3564 RPM. Hay un campo alrededor de esta barra a una frecuencia muy baja.. Este campo aplica una fuerza al estator con magnitudes variables., dependiendo del nivel de flujo en el rotor en ese momento. Este flujo pulsa cada vez que pasa a través de una ranura del estator.. Tenga en cuenta que la fuerza que ve el rotor está en la frecuencia de paso de la ranura del estator y se modula con el doble de deslizamiento.. Esto producirá vibración de las barras del rotor en la frecuencia de paso de la ranura del estator más y menos frecuencias de banda lateral en múltiplos de (deslizar) X (polos).
1.6 análisis de vibraciones en motores eléctricos e avvibración a 1 x RPM – desequilibrio
1.6.1 desequilibrio del motor: Fabricación y equilibrio de fábrica.
UNA equilibrio Se requiere en todo tipo de maquinaria rotativa., incluyendo motores, para conseguir una máquina que funcione sin problemas. Esta operación se realiza en fábrica., en una máquina equilibradora, con un nivel de precisión determinado por la velocidad, Requisitos de vibración y dimensiones del motor.. Se requiere la mayor precisión para motores de dos polos.. Los motores de dos polos y aproximadamente de cuatro polos deben equilibrarse a su velocidad de funcionamiento en la máquina equilibradora.. Luego, los motores ensamblados se prueban para confirmar que se cumplen los requisitos de vibración en servicio..
Factores Factores importantes que afectan el equilibrio en la fábrica. (principalmente en motores de dos polos)
La mayoría de los motores medianos y grandes se utilizan para aplicaciones de velocidad constante., aunque ha habido un aumento reciente en el número y tamaño utilizados para aplicaciones de velocidad variable en variadores de velocidad ajustable. Los motores de velocidad constante sólo necesitan equilibrarse con precisión a una velocidad, su velocidad de funcionamiento. Las aplicaciones de velocidad variable requieren que se mantenga un buen equilibrio del rotor en todo el rango de velocidad operativa., que normalmente puede ser 40% una 100% de velocidad sincrónica.
Los requisitos fundamentales para el equilibrio de precisión en cualquier máquina son:
- Las piezas deben mecanizarse con precisión para lograr una concentricidad cercana y un desequilibrio mínimo individualmente..
- La brecha de partes, que puede resultar en dislocación durante la operación, provocando un cambio en el equilibrio, debe evitarse o minimizarse.
- Se deben agregar pesos de corrección de equilibrio en o cerca de los puntos de desequilibrio..
para los motores, Las cavidades del rotor deben fabricarse con precisión., con concentricidades cercanas de todas las características y tienen un ajuste por contracción en el eje que se mantiene en todas las velocidades de rotación y temperaturas de funcionamiento. Los punzones deben apilarse en escuadra con el agujero., Presionado uniformemente y sujeto en su posición cuando se contrae sobre el eje para evitar el movimiento con el cambio de velocidad.. Están hechos de material de alta resistencia diseñado con un ajuste de interferencia adecuado.. Las barras del rotor están acuñadas y/o engarzadas para que queden apretadas en las ranuras.. Existen otros métodos para garantizar la estanqueidad de las barras del rotor., como calentamiento del núcleo y enfriamiento de barras, pero estos métodos no son comunes. Los conectores finales deben soldarse por inducción simétricamente a las barras., lo que ayuda a eliminar las variaciones de equilibrio debidas a los cambios térmicos. El eje y el rotor ensamblados están mecanizados con precisión y rectificados para obtener concentricidades dentro de los límites establecidos. 0,02 mm.
Las aplicaciones de velocidad constante generalmente se satisfacen con un diseño de eje rígido, para máquinas más pequeñas, ya sea con un diseño de eje flexible, para motores más grandes. una concepción de “eje duro” es aquel que corre por debajo de su primera velocidad crítica lateral, mientras que una concepción de “eje flexible” trabaja por encima de la primera velocidad crítica lateral.
Las aplicaciones de velocidad ajustable requieren un eje rígido para evitar grandes cambios de equilibrio con la velocidad debido a la deflexión del eje., como puede ocurrir con un eje flexible. Además, sin embargo, Los muchos otros factores que afectan el equilibrio en esta compleja estructura., discutido anteriormente, También debe controlarse para mantener un buen equilibrio a diferentes velocidades.. Esta situación se evita calzando la barra del rotor y, a veces, mediante estampación, como se ha mencionado más arriba. Las cuñas alrededor de las barras., como los que se usan aquí, permita que las barras se inserten firmemente en las ranuras sin preocuparse de que las laminaciones corten pedazos de la barra, haciendo que las barras se suelten. Este diseño también evita que las barras se aflojen con el tiempo en el campo debido a un fenómeno similar., que puede ocurrir durante el calentamiento y enfriamiento, donde las barras no pueden expandirse ni contraerse al mismo ritmo que el núcleo.
procedimiento de equilibrio
Cuando el rotor está diseñado y fabricado con precisión, como se describió anteriormente, un equilibrio de dos aviones, con correcciones de peso en los extremos del rotor, suele ser suficiente, incluso para rotores flexibles.
El equilibrio del rotor involucra toda la estructura del rotor., que se compone de multitud de partes, incluyendo el eje, las laminaciones del rotor, las cabezas finales, como las barras hacen el rotor, los conectores finales, los anillos de retención (cuando necesario) y los fans. Estos muchos elementos deben controlarse en el diseño y la fabricación para lograr una balanza de precisión estable..
El rotor está preequilibrado sin ventiladores., luego se montan los ventiladores y finalmente se equilibran sobre el rotor. Los ventiladores se equilibran individualmente antes de montarlos en el impulsor.. Para motores con ventilador externo pesado, puede ser necesario equilibrar el ventilador en dos planos.
Durante las pruebas de equilibrio y vacío en el taller., El chavetero de extensión del eje está completamente lleno con un medio chavetero coronado y contorneado., mantenido en su lugar por una manga mecanizada para evitar cualquier desequilibrio de esta fuente. La prueba de carga se realiza con el motor montado sobre una base sólida y rígida., alineado con precisión a un dinamómetro y acoplado con un acoplamiento equilibrado de precisión y un chavetero adecuado.
Ocasionalmente, Es posible que un rotor flexible necesite equilibrarse en tres planos para limitar la vibración cuando la máquina pasa su velocidad crítica durante el arranque o la desaceleración.. Esto se consigue realizando también correcciones de peso en el plano central del rotor., así como en ambos extremos.
1.6.2 análisis de vibraciones en motores eléctricos e o ddesequilibrio térmico
El desequilibrio térmico es una forma especial de desequilibrio térmico.. Es causado por un calentamiento desigual del rotor o una flexión desigual debido al calentamiento del rotor.. La solución adecuada es determinar el motivo del calentamiento desigual que hace que el eje se doble y reparar el impulsor.. Antes de realizar un trabajo de reparación tan importante, es necesario determinar la gravedad de la situación térmica.. Los rotores alternativos muestran algunos cambios en la vibración al pasar de un estado frío a un estado caliente. UNA API 541, 32da edición, permite un cambio de 15 μm en vibración del eje (a la frecuencia de rotación, 1X) y un cambio de 1,3 mm/s en vibración del alojamiento del rodamiento. Sin embargo, si la aplicación es de servicio continuo y los niveles de vibración no son excesivos durante el arranque (o sea, motor frio), está permitido permitir un mayor cambio de frío a caliente sin ningún daño al motor. en estas situaciones, si se desean los niveles de vibración más bajos en condiciones de funcionamiento, Se puede realizar un procedimiento de equilibrio en caliente.. Para realizar este procedimiento, Haga funcionar el motor hasta que todas las condiciones se estabilicen térmicamente y realice rápidamente un equilibrio en caliente.. Si fuera necesario, Puede hacer funcionar el motor nuevamente después de instalar los pesos de prueba iniciales y permitir que el motor se estabilice térmicamente antes de tomar mediciones de vibración adicionales para la corrección final del peso..
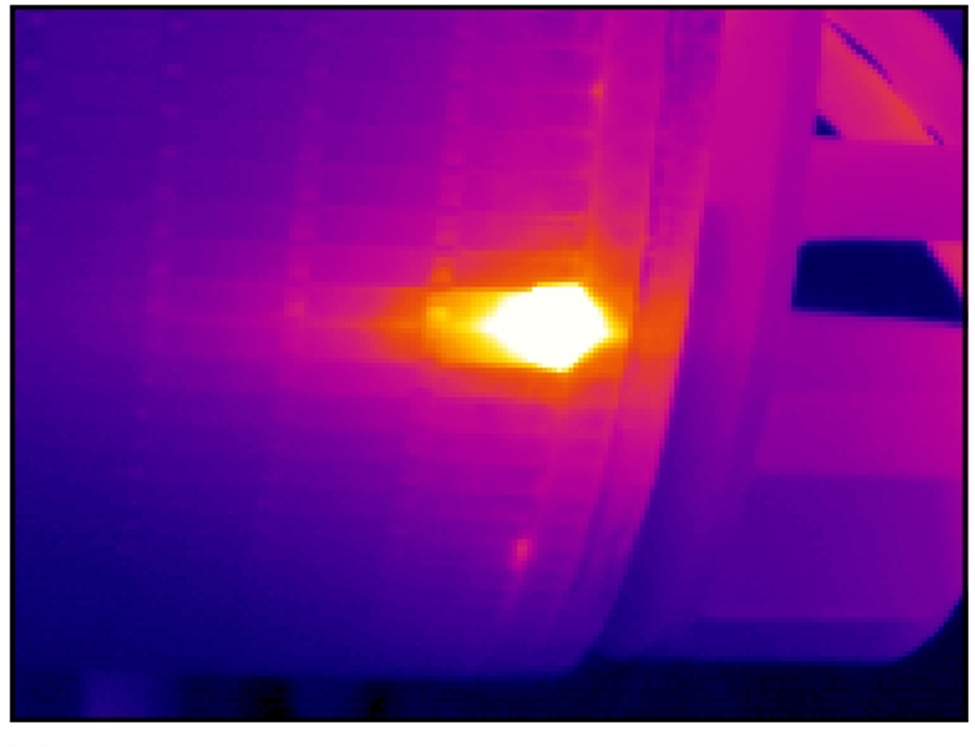
Figura 17 - Punto de acceso en un rotor de un motor de inducción
1.6.3 Desequilibrio de acoplamiento
El límite de desequilibrio del acoplamiento dado en API 671 de 40W/N, Cuando se aplica a un motor típico 1000 HP 3600 rpm 2 polos, por ejemplo, da un valor igual a aproximadamente un tercio del límite de desequilibrio del motor para un extremo.
El análisis muestra que este sería el valor correcto para tener un efecto mínimo sobre la vibración del motor.. Comparando este valor con los límites de desequilibrio del acoplamiento AGMA comúnmente utilizados en la industria, es comparable a un equilibrio de clase 11 que requiere un acoplamiento equilibrado. Es considerablemente mejor que un equilibrio de clases. 9 (por un factor de 3) eso no es un acoplamiento balanceado. Acoplamientos de equilibrio de clase AGMA 9 A veces se utilizan para motores. 2 polos, pero no cumple con el estándar API 671 y puede causar problemas de vibración con motores de precisión..
El uso de un chavetero adecuado y un acoplamiento equilibrado deja equilibrados la alineación de la máquina, el montaje y el equipo accionado., como el, Principales factores de vibración del sistema..
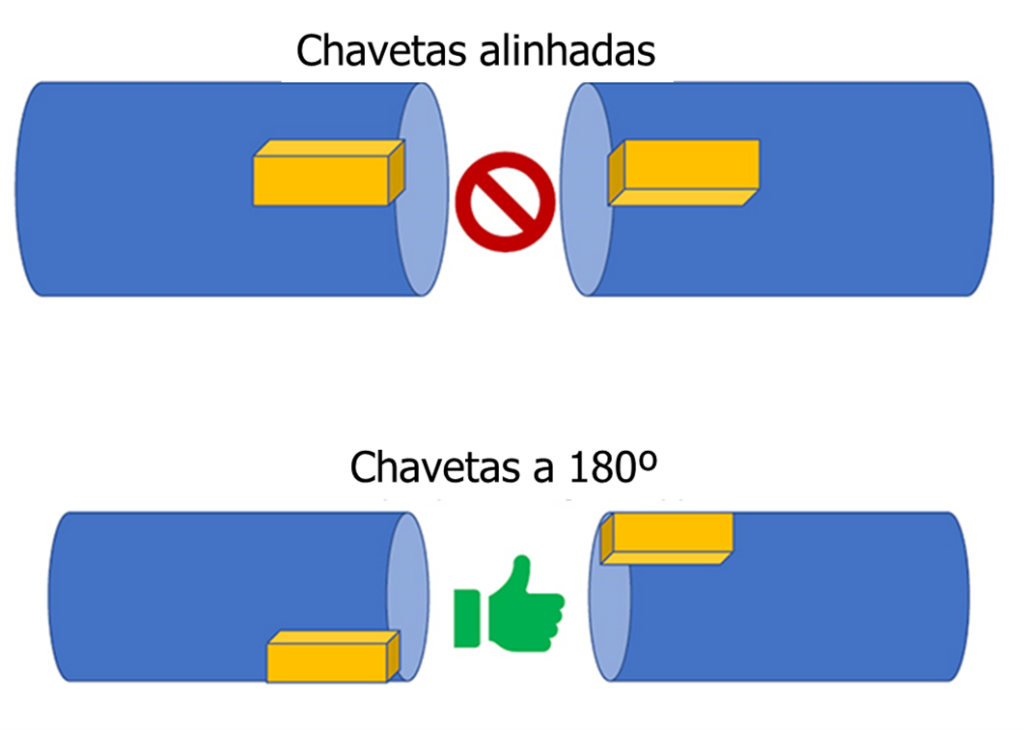
Figura 18 – Desequilibrio de acoplamiento
1.6.4 Acoplamento sobredimensionado
Una consideración en la selección del acoplamiento es el tamaño del acoplamiento.. El acoplamiento debe ser lo suficientemente grande para manejar la aplicación., incluyendo el factor de servicio requerido, pero no debe ser excepcionalmente grande. Los posibles resultados de los acoplamientos sobredimensionados son:
- Mayor vibración del motor debido a un mayor desequilibrio del acoplamiento y/o un cambio en la velocidad crítica o la respuesta del rotor debido al aumento de peso. Esto es particularmente cierto para las máquinas de eje flexible..
- Un acoplamiento muy grande puede provocar una flexión muy severa del eje., Vibración excesiva y fuerte fricción de los sellos., finalmente resultando en una falla catastrófica del eje.
La frecuencia de vibración predominante como resultado de un acoplamiento sobredimensionado sería de una rotación., como en una situación de desequilibrio. El concepto de “mas grande es mejor” no es cierto aquí!
1.6.5 análisis de vibraciones en motores eléctricos ydbalanza de máquina accionada
Bajo circunstancias normales, el desequilibrio de la máquina accionada no debe afectar significativamente a la vibración del motor. Sin embargo, si el desequilibrio es severo, o si se utiliza un acoplamiento rígido, entonces el desequilibrio de la máquina accionada puede transmitirse al motor.
1.6.6 Cuidado para mantener la condición de equilibrio en el campo.
Cuando se instala en el campo un motor de alta velocidad finamente equilibrado, su equilibrio debe mantenerse cuando el motor está acoplado al resto del sistema. Además de utilizar un acoplamiento equilibrado, se debe utilizar la clave adecuada.
Una forma de obtener un chavetero adecuado es llenar completamente el chavetero del eje., con un chavetero completo a través del cubo del acoplamiento y todo el chavetero fuera del acoplamiento coronado para coincidir con el diámetro del eje. Un segundo enfoque es utilizar un chavetero rectangular de la longitud adecuada., de modo que la parte que se extiende más allá del cubo de acoplamiento hacia el motor reemplace el desequilibrio de la ranura abierta ensanchada. Esta longitud se puede calcular si se conocen la longitud del cubo del acoplamiento y las dimensiones del chavetero..
Una clave incorrecta puede provocar un desequilibrio significativo del sistema., lo que puede causar que la vibración esté por encima de los límites aceptables. Por ejemplo, Cálculos para un motor típico. 1000 HP, 2 adiós 3600 rpm muestran que un error en la longitud de la clave de 3 mm dará un desequilibrio de 506 g.mm. Esto es aproximadamente igual al límite de desequilibrio residual para cada extremo del rotor de 4W/N indicado en la API. 541 para motores, y excede por un factor de 3, la tolerancia de desequilibrio residual de una mitad de acoplamiento típica de 40 W/N dada en la API 671 para acoplamientos.
Ocasionalmente, Surge un problema en el campo cuando una máquina de eje flexible con un equilibrio de alta velocidad, se envía a un taller de mantenimiento para su reparación. Si el rotor se reequilibra en una máquina equilibradora de baja velocidad en el taller de mantenimiento, Esto generalmente resulta en un desequilibrio en la velocidad de funcionamiento y la máquina no funcionará correctamente cuando se pruebe o se reinstale.. La solución, obviamente, no es reequilibrar a menos que sea absolutamente necesario debido a la naturaleza de la reparación. Si el reequilibrio es absolutamente necesario, debe realizarse a la velocidad de funcionamiento del rotor; caso contrário, Puede ser necesario realizar un equilibrio de compensación después de volver a montar el motor..
1.7 análisis de vibraciones en motores eléctricos Velocidad de vibración medida en la carcasa en mm/s rmsvibración de respuesta forzada
1.7.1 análisis de vibraciones en motores eléctricos e a bcompartimiento del motor débil
Si el motor está sobre una base de acero fabricada, como una base deslizante, entonces existe la posibilidad de que la vibración que se mide en el motor esté muy influenciada por una base vibratoria. Idealmente, La base debe ser lo suficientemente rígida para cumplir con los criterios de “cimiento masivo” definido por API 541. Esencialmente, esto requiere que la vibración del soporte cerca de las patas del motor sea menor que 30% de la vibración medida en el cojinete del motor.
Para probar una base débil, medir y trazar la vibración horizontal a nivel del suelo, na base, en el medio y en la parte superior de la base, y en el cojinete del motor.
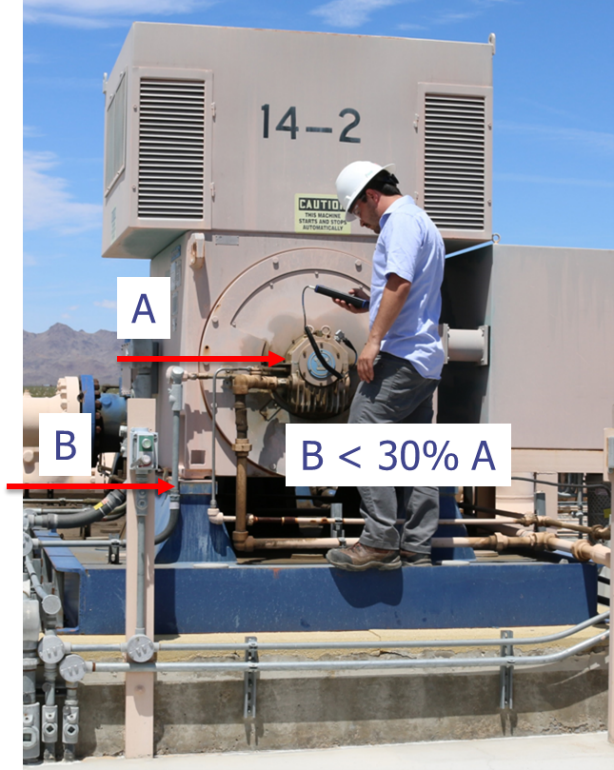
Figura 19 – Vibración de la base del motor
Una base de motor débil generalmente resulta en una vibración 1x alta, normalmente en dirección horizontal. Sin embargo, También puede provocar una vibración 2 veces mayor. (el doble de la frecuencia de rotación) o 2f (el doble de la frecuencia de la línea), que también es una frecuencia de vibración común en los motores.. Para determinar la naturaleza y fuente de esta vibración 2x alta., es necesario realizar mediciones de vibraciones en las patas del motor, tanto vertical como horizontalmente, teniendo en cuenta la fase y la amplitud para determinar una forma modal. O “modo swing” del motor observado en un caso particular se ilustra a continuación. La componente horizontal δalto voltaje debido al equilibrio se suma a δHM motor inherente para dar un alto total en la caja del cojinete, como lo muestra la equivalencia a continuación.
dH= reHM+dalto voltaje
me que:
dH = Vibración horizontal real del motor medida en el suelo
dHM = Vibración horizontal del motor aislado medida sobre una base sólida en el taller
dalto voltaje =D/E * Vibración horizontal calculada por VB
componente debido a δV.B., Vibración vertical medida en cada pie del motor en el campo..
La reparación recomendada para la base débil del motor es que las vigas de soporte se unan entre sí y se refuercen fuertemente con la intención de cumplir con los criterios para un “cimiento masivo”. Incluso cuando la resonancia base no es un factor, El refuerzo de una estructura de soporte liviana puede reducir en gran medida la vibración..
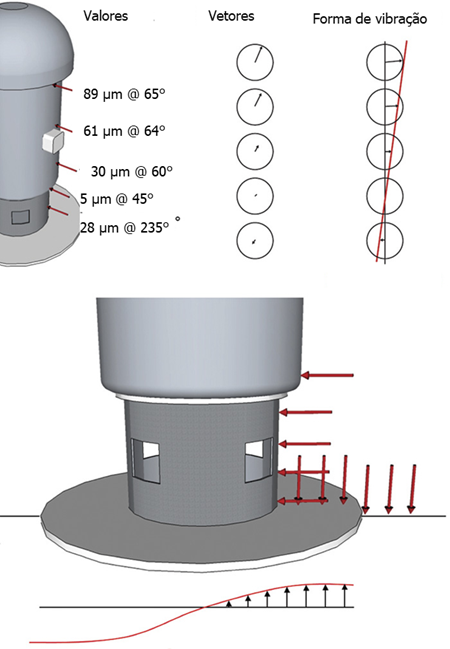
Figura 20 – Modo de oscilación debido a una base débil.
1.7.2 análisis de vibraciones en motores eléctricos e a fsecuencia natural estructural
La frecuencia natural estructural de un motor vertical es función de su masa., Distribución de masa y geometría de la base.. La frecuencia natural estructural no debe confundirse con la velocidad crítica lateral del rotor del motor.. Sin embargo, en grandes motores verticales, La velocidad crítica lateral del rotor puede ser un factor determinante en la frecuencia natural estructural., particularmente del motor solo.
El efecto del rotor se puede determinar considerándolo como una masa separada e incluyendo la flexibilidad del eje del rotor en el cálculo de la frecuencia natural estructural.. O sea, Se considera que el motor es un sistema de dos masas y dos grados de libertad., en lugar de un sistema de un solo grado de libertad, como se describe en la norma SIN MG 1-20.55. La estructura del motor es básicamente un sistema de dos masas que puede simplificarse progresivamente., primero para un esquema de marco de viga-masa, luego a un sistema equivalente de dos masas y dos resortes.

Figura 21 – Modos de vibración de la estructura de un motor vertical en resonancia.
Cuando la velocidad lateral crítica del rotor es menor que la frecuencia estructural calculada como un sistema de un solo grado de libertad., la frecuencia estructural real será menor que la calculada. Sin embargo, cuando se monta sobre una base flexible en el campo, el efecto del eje del rotor será menor y un cálculo de un solo grado de libertad es generalmente adecuado. Como en el caso de un crítico lateral., si la velocidad de funcionamiento del motor (o cualquier otra frecuencia en la que esté presente una función forzada) coincidir con la estructura crítica, Habrá una gran amplificación en la amplitud de la vibración.. Los fabricantes de motores publican periódicamente datos críticos de frecuencia estructural. Esto incluye la frecuencia estructural natural que tendría el motor por sí solo si estuviera montado sobre una masa sísmica rígida..
Además, El fabricante del motor proporciona la siguiente información para ayudar a determinar la frecuencia de resonancia del sistema con el motor montado en la base del usuario.:
- peso de la máquina,
- Ubicación del centro de gravedad.
- deflexión estática.
Las bases que se encuentran en instalaciones típicas no son tan rígidas y, consecuentemente, la frecuencia crítica de la estructura será menor. Si la frecuencia natural de la estructura cae a una frecuencia en la que hay una función de forzamiento presente (normalmente la velocidad de rotación), la frecuencia crítica de la estructura deberá cambiarse. ordinariamente, Esto no es difícil de hacer y a menudo se logra cambiando la rigidez de la base o cambiando el peso de la base/motor.. Cuando la frecuencia natural de la estructura cae por debajo de la velocidad de funcionamiento a aproximadamente 40% una 50% de velocidad de funcionamiento, Esto puede provocar vibraciones subarmónicas a la velocidad de resonancia del sistema en motores con cojinetes de metal antifricción. Esto podría deberse a los efectos del látigo del petróleo. (látigo de aceite) o una película de aceite inadecuada en el cojinete guía.
1.7.3 análisis de vibraciones en motores eléctricos e a basa resonante
Si la velocidad de funcionamiento del motor (o cualquier otra frecuencia donde esté presente una fuerza forzada) coincidir con la frecuencia de resonancia de la base, Habrá una gran amplificación de la amplitud de la vibración.. La única solución a este problema es cambiar la frecuencia de resonancia de la base.. ordinariamente, Esto no es difícil de hacer, y a menudo se logra cambiando la rigidez de la base, o cambiando el peso de la base/motor.
1.7.4 análisis de vibraciones en motores eléctricos e avvibración relacionada con el rodamiento
Las máquinas con cojinetes metálicos antifricción pueden experimentar vibraciones ocasionalmente. “Cuando se produce el contacto entre el rotor y el cojinete”, que ocurre con una frecuencia de aprox. 45% de velocidad de funcionamiento. Este valor puede ser bastante alto., particularmente si hay una velocidad crítica igual o menor que 45% de velocidad de funcionamiento, lo que se conoce como una condición de “látigo de aceite”. Además de las consideraciones básicas sobre el diseño de rodamientos, eso no se abordará aquí, una causa común es la alta viscosidad del aceite debido a la baja temperatura del aceite en motores lubricados por inundación que operan en condiciones ambientales frías.. Vibraciones subarmónicas similares, pero de baja amplitud, Puede ocurrir en rodamientos lubricados con anillos., probablemente debido a la lubricación marginal. Otras causas de vibración son la falta de redondez del muñón o la desalineación del rodamiento..
Como Los rodamientos tienen las frecuencias de defectos típicas.. Estas frecuencias predeterminadas son para el carril interior., a pista exterior, la rotación de las esferas (o rollos) y el tren jaula fundamental. Muchas investigaciones han demostrado que no es posible dar una respuesta absoluta a las amplitudes permitidas en las frecuencias de defectos de los rodamientos.. Consecuentemente, El aspecto más importante a tener en cuenta para indicar un desgaste significativo de los rodamientos es la presencia de varios armónicos de frecuencia debido a defectos en los rodamientos., especialmente si están rodeados por bandas laterales independientes de la amplitud. El seguimiento de vibraciones deberá realizarse desde la instalación., Observar estos indicadores para predecir la vida útil restante del rodamiento..
2 ANÁLISIS DE VIBRACIONES EN MOTORES ELÉCTRICOS –IDENTIFICACIÓN DE LA CAUSA DEL PROBLEMA DE VIBRACIÓN
2.1 Monitoreo vs.. Medición instantánea
Una medición instantánea se refiere a la obtención de datos de vibración espectral en un instante en el tiempo.. Los detalles de amplitud vs.. frecuencia están disponibles en este formato..
Uno supervisión Se refiere a la recopilación de datos de vibración durante un período. (normalmente diez o quince minutos), para poder analizar la variación de la vibración en función del tiempo.
Recomendaciones para medición instantánea, con un recolector de datos, son los siguientes:
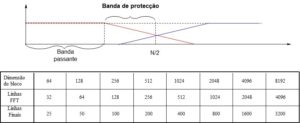
- La tecnología actual permite diferenciar problemas de origen eléctrico de problemas de origen mecánico.. El aspecto fundamental para diferenciar el origen de estos problemas se encuentra en la capacidad de análisis con un gran número de líneas espectrales de resolución y, en algunos casos, en la capacidad de “zoom” del analizador FFT.
- Es necesario visualizar claramente en el espectro la actividad vibratoria alrededor de la frecuencia de rotación del rotor., distinguir claramente la frecuencia correspondiente al doble de la frecuencia de red de los armónicos de velocidad del rotor
- Una buena resolución espectral también permitirá diferenciar problemas a alta frecuencia de origen eléctrico de aquellos de origen mecánico., como sería el caso de un defecto mecánico en un rodamiento.
- Análisis dinámico del rotor en el 0 una 200 hz, com 1600 líneas de resolución y 4 medios de comunicación. Parámetros de análisis de banda recomendados:
- velocidad del rotor, entre 0,8xRPM y 1,2xRPM
- frecuencia de red, entre 49,5 Hz y 50,5 hz
- 2xFl (frecuencia de red), entre 99,5 Hz y 100,5 hz
- Análisis de la excentricidad del rotor en el 0 una 3000 hz, (frecuencia de barra+400 Hz), com 3200 líneas de resolución y 4 medios de comunicación. parámetros recomendados:
- velocidad del rotor, entre 0,8xRPM y 1,2xRPM
- frecuencia de red, entre 49,5 Hz y 50,5 hz
- 2xFl (Frecuencia de red), entre 99,5 Hz y 100,5 hz
- Número de barras +/- 0,5 RPM del rotor
- Número de barras +/- 2x Frecuencia de red
- No. de ranuras +/- 0,5 RPM del rotor
- No. de ranuras +/- 2x Frecuencia de red
típicamente, Las siguientes frecuencias se monitorean cuando se monitorea: 1/2X, 1X, 2X, mi 50 hz, 100 hz, y niveles generales de vibración (es decir. sin filtrar), donde X corresponde a la frecuencia de rotación.
Adicionalmente, La información de la fase debe ser monitoreada cuando se realiza el monitoreo., especialmente para la frecuencia de rotación de una vez. Esto permitirá identificar y posteriormente corregir diversos problemas de vibración..
A veces, Es deseable separar la vibración para 100 Hz y el doble de la frecuencia de rotación.. Se necesitan diferentes métodos para hacer esto sin carga y con carga completa.. a plena carga, La diferencia de frecuencia es lo suficientemente grande como para que los componentes separados se puedan medir directamente con la mayoría de los analizadores de vibraciones.. Sin embargo, en vacío, Las frecuencias están tan cerca unas de otras que esto no se puede hacer., incluso usando el modo zoom en un analizador de alta resolución, entonces se necesita un método indirecto. Esto se puede lograr midiendo el valor 2 x RPM a voltaje reducido (25%) donde el componente 2 la línea x es insignificante, y luego restándolo del componente 2 pico x en la prueba de seguimiento que es la suma de los componentes 100 Hz y 2 x RPM. ordinariamente, Esto sólo es posible en las instalaciones del fabricante de motores o en un taller de mantenimiento de motores..
2.2 Procedimiento de solución de problemas
Si ocurre un problema de vibración, hay varias pruebas que se deben realizar. pero, en primer lugar, Se deben verificar los siguientes elementos de mantenimiento..
acciones de mantenimiento
- Compruebe si hay tornillos flojos – ensamblaje u otras piezas sueltas
- Mantenga el motor libre de suciedad o residuos.
- Verifique que las temperaturas de entrada y enfriamiento sean adecuadas o que no haya obstrucciones., como trapos, pelusa u otros envoltorios
- Compruebe las temperaturas del rodamiento y del estator.
- Lubricar según lo recomendado
- Verifique los niveles de aceite correctos
- Compruebe periódicamente si hay vibraciones y registre
- Todos los tornillos están apretados? Se ha eliminado la pierna del muslo.?
- La alineación en caliente es adecuada? Si no es posible comprobar la alineación en caliente, Se ha comprobado la alineación en frío. (con compensación térmica adecuada de frío a calor)?
- alguna pieza, cubierta superior de la caja, La tubería vibra excesivamente. (o sea, alguna parte conectada al motor está en resonancia)?
- La base o estructura sobre la que está montado el motor vibra más de 25% por la vibración del motor (o sea, la base del motor es débil o resonante)?
- Integridad de ventiladores y acoplamientos. – las aspas del ventilador están corroídas/rotas, los pernos de acoplamiento están flojos o faltan, la lubricación del acoplamiento es satisfactoria?
Si todos los elementos anteriores se verifican satisfactoriamente y la vibración permanece alta, Se requerirá un análisis completo de vibraciones..
Esencialmente, solo hay dos pasos para diagnosticar un problema:
- Obtener datos de vibración – no siempre claro debido al ruido, bandas laterales, combinación de signos, modulación, etc..
- Determinar qué condiciones aumentan, Disminuir o no tener ningún efecto sobre la vibración en diferentes condiciones de prueba para ayudar a aislar la causa raíz..
análisis de vibraciones en motores eléctricos – pruebas a realizar
Idealmente, Las mediciones de vibración deben tomarse con el motor en marcha en las siguientes condiciones.:
| condición de carga | Acoplado | tensión | comentarios | observaciones |
| con carga | Sim | 100% | Primera medida a obtener. Representa el estado de la máquina en funcionamiento real. Puede indicar qué prueba realizar a continuación.. | Todas las condiciones se estabilizaron (es decir. condiciones normales de funcionamiento) |
| Sin cargo | Sim | 100% | Elimina la vibración relacionada con la carga., mientras que todo lo demás sigue igual, no siempre es posible llegar a la carga cero, pero normalmente es posible reducir la carga. | |
| Sin cargo | No | 100% | Elimina todos los efectos del acoplamiento y la máquina accionada. Aísla el sistema motor/base.. | |
| Sin cargo | No | 25% | Se minimiza el efecto de las fuerzas de atracción magnética. (el uso más efectivo se compara con la vibración a pleno voltaje, 25% Normalmente sólo es posible en el taller de mantenimiento de motores o en las instalaciones del fabricante del motor.. Si el motor es un motor conectado Y-A, entonces la conexión Y efectivamente tiene 57% voltaje en comparación con la conexión al mismo voltaje terminal. Una comparación de la vibración en ambos enlaces., revelará la sensibilidad del motor al voltaje. | |
| Sin cargo, en la parada | No | 0% | Hará evidente cualquier problema crítico de velocidad/resonancia para todo el sistema del motor/base/equipo impulsado.Observar el cambio en la vibración cuando se corta la alimentación del motor brindará información similar a la de operar con voltaje reducido., como se ilustra en la figura 16. |
- Los datos deben adquirirse en el dominio de la frecuencia y el dominio del tiempo..
- durante la desaceleración, uno gráfico de cascada proporcionará datos en el dominio de la frecuencia (datos espectrales de vibración) versus velocidad, que puede ser muy útil.
- Uno gráfico Bodé producirá amplitud y fase vs.. velocidad.
- Se entiende que el voltaje 25% no disponible en el campo. La medición de vibraciones de voltaje reducido es uno de los métodos más potentes disponibles para separar las vibraciones inducidas eléctricamente. (que se manifiesta al doble de la frecuencia de la red) vibración inducida mecánicamente (que se manifiesta en el doble de velocidad de rotación) en motores de dos polos. Consecuentemente, el método ha sido incluido.
Comportamiento bajo diversas condiciones.
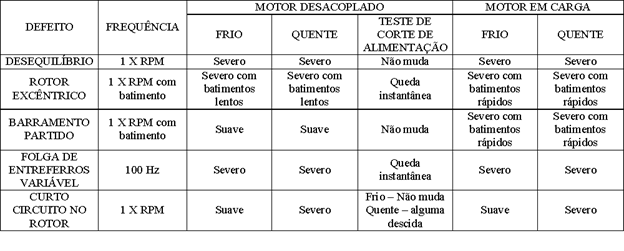
La siguiente tabla muestra el comportamiento de vibración esperado de un motor en diferentes condiciones..
La siguiente figura muestra el comportamiento de vibración esperado de un motor., cuando se corta la luz.
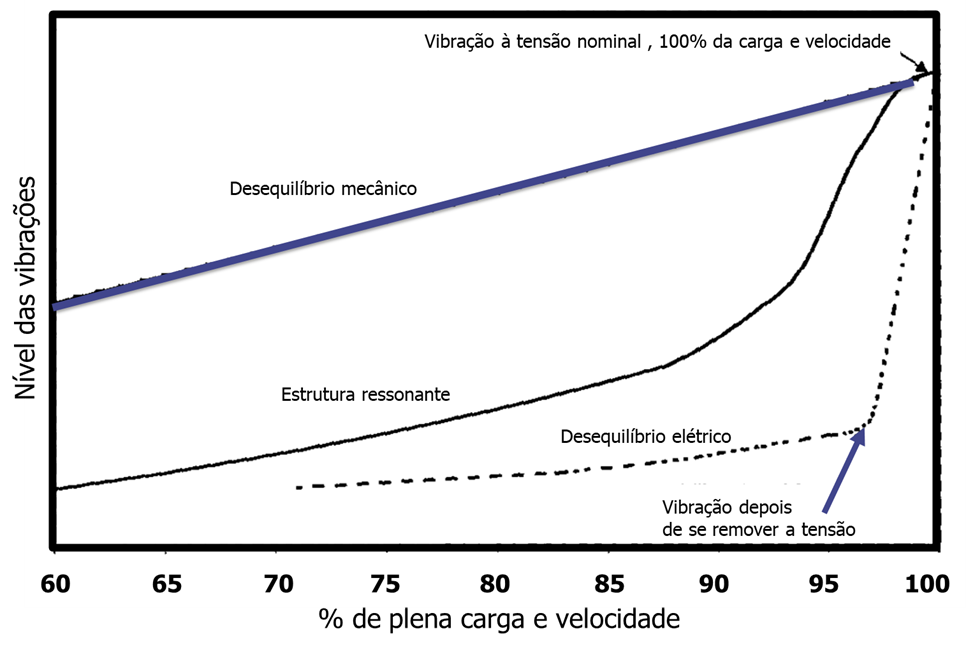
Figura 22 – Evolución de la vibración cuando se corta la energía
3 MESA DE DIAGNÓSTICO DE ANÁLISIS DE VIBRACIONES EN MOTORES ELÉCTRICOS
| Causa | Frecuencia de vibración | Ángulo de fase | respuesta de amplitud | Corte de energía | comentarios |
| Desalineación del rodamiento | Principalmente 2 x algunos 1 x Radial alto en el lado impulsor y axial | La fase puede ser inestable. | Estable | Disminuye lentamente con la velocidad | 2 x puede dominar durante la desaceleración. 2 x es más predominante con mayor desalineación |
| Desalineación del acoplamiento | Principalmente 1 x Radial alto en el lado impulsor y axial | 1800 eliminación gradual entre los dos lados del acoplamiento | Estable | El nivel baja lentamente con la velocidad. | El paralelo provoca fuerzas radiales y el angular provoca fuerzas axiales.. Dependiente de la carga. |
| Sello/cojinete de fricción | Se puede ver 1/4x, 1/3X, 1/2x o 10-20x Principalmente 2 x algunos 1 X. radial. | Inestable | Inestable dependiendo de la gravedad.. | Desaparece repentinamente a una velocidad más lenta.. | Las fricciones completas tienden a ser 10 una 20 tiempos más altos. La desalineación de los rodamientos puede causar síntomas de fricción. |
| fricción del rotor | Se puede ver 1/4x, 1/3X, 1/2x y 1x con bandas laterales en frecuencia. deslizamiento radial. | Inestable | alta | golpes fuertes | |
| Desaperto: cojinete (no giratorio) | Podem ser vistas 2x, 3X. Radial | Estable | flota | Desaparece a menor velocidad. | Holgura en el asiento del rodamiento. Holgura en la separación de rodamientos |
| Desaperto: Núcleo al rotor (giratorio) | 1 un com 10x 1, 2 mi 3 predominante. Radial | Puede existir dependiendo del tipo de holgura. El núcleo flojo en general da un síntoma errático. | Inestable, nivel alto | Cae rápidamente. Puede desaparecer repentinamente. | Placas finales sueltas. Diámetro interior del núcleo suelto. |
| Desaperto: Pedestal (no giratorio) | 1 un com 10x 2 mi 3 predominante. Radial & Axial | Estable | flota. | Desaparece a menor velocidad. | |
| Desaperto: ventilador externo | Radial y Axial, lado ventilador | N / A | flota. | Cae con la velocidad. Puede desaparecer repentinamente. | |
| desequilibrio del rotor | 1x RPM Radial | Accionamiento de fase y lado libre. El acoplamiento produce una condición desfasada | Estable | El nivel baja lentamente. | Rotor desequilibrado – podría deberse a problemas térmicos. |
| Desequilibrio del ventilador externo | 1x Radial elevado en el lado del ventilador. 1x Axial elevado en el lado del ventilador. | Lado del acoplamiento desfasado 1800 con la maquina funcionando, lado del acoplamiento. | Estable | El nivel baja lentamente. | |
| Acoplamiento de desequilibrio | 1x radial y superior en el lado de transmisión | Estable | El nivel baja lentamente. | Desequilibrio por acoplamiento o chaveta | |
| Extensión del eje doblado | principalmente 2x pode ser vista 1x Axial | 1800 desfasado en ambos lados del acoplamiento | Estable | El nivel baja lentamente | La excentricidad del lado de transmisión debe originarse 2x axial en ese extremo. Desplazamiento normal en el núcleo. – 20 una 50 micrón |
| Entrehierro excéntrico | forte 100 Radial Hz | N / A | Estable | Desaparece al instante | La diferencia entre el entrehierro máximo y mínimo dividida por el promedio debe ser menor que 10%. |
| Rotor excéntrico del pie del muslo. | 1xrpm principalmente algunos 50 mi 100 Radial Hz | Inestable | Modula en amplitud con deslizamiento. | Desaparece al instante | Límite de excentricidad 20 una 50 El ritmo de deslizamiento de micrones cambia con la velocidad/carga.. |
| Núcleo del estator flojo. | 100 hz. axiales y radiales (ver sin sobre) | Estructura y soporte en fase a 100 hz | Estable | Desaparece al instante | Verificar el movimiento relativo del núcleo del estator en relación con la estructura.. |
| Empeño del rotor (origen termal) | 1x Principalmente se pueden ver algunos 100 Hz Puede tener moduladores a 1X y 2X vib. Radial | Inestable | Cambios con la temperatura.. Relacionado con el clima o la rana. Varía con la frecuencia. deslizamiento x polos | algunos caen, pero el alto nivel caería con la velocidad | Relacionado con el calor. Examine el rotor para ver si la pila de hojas está apretada o suelta de manera desigual. Cortocircuito en el rotor Comprobar que las barras del rotor estén flojas |
| barras rotas del rotor | 1x y modulado por el deslizamiento x n. polos. Puede tener altas frecuencias de ranura del estator. | Depende de dónde se encuentren las barras rotas.. | POSIBILIDAD DE GOLPE DURO. Varía según la frecuencia.. correderas x postes – La amplitud aumenta con la carga. | Desaparece al instante | Se pueden observar chispas en el entrehierro.. La variación a largo plazo de las frecuencias de las ranuras del estator puede ser un indicador de problemas en el bus. Las barras rotas provocan vacíos en el campo magnético. Grandes fluctuaciones actuales. El análisis actual muestra bandas laterales de frecuencia de deslizamiento. |
| barras sueltas | 1 x Posible efecto de equilibrio con la sensibilidad térmica. Frecuencia radial. de la ranura del estator más las bandas laterales a ±(n°. Postes*Deslizamiento) | La vibración a 1 x será estable. La frecuencia de las ranuras del estator se modulará provocando una fluctuación en el ángulo de fase en la vibración general. | Estable | La frecuencia de la ranura del estator desaparecerá inmediatamente.. El efecto de desequilibrio puede desaparecer repentinamente a una velocidad más baja.. | Un aflojamiento excesivo puede provocar problemas de equilibrio en motores de alta velocidad. |
| Degradación del aislamiento entre fases. | 50 & 100 Radial Hz | N / A | Estable y posible paliza. | Desaparece al instante | |
| Daños a la tierra | 50 hz & 100 Frecuencias de barra Hz – Radial | Estable y posible paliza. | Desaparece al instante | ||
| Desequilibrio de voltaje de la fuente de alimentación | 100 Radial Hz | 100 Hz estable y posible ritmo. | Desaparece al instante | ||
| vibración de ruido eléctrico | (RPM x número de hoyos del rotor)/60 +1-100, 200, etc.. – Radial | Debido a la modulación, la vibración general fluctuará | Estable | Desaparece al instante | Aumenta al aumentar la carga.. |
| resonancia del sistema | 1 x RPM u otra frecuencia forzada. Un plano, generalmente horizontal | Varía según la carga y la velocidad. | Varía | Desaparece rápidamente | Es posible que sea necesario reforzar los cimientos. – puede involucrar otros factores |
| Esfuerzo | 1 x RPM | Estable | Causado por la distorsión de la carcasa o los cimientos debido a la estructura adjunta. (tubería). | ||
| caja de rodamiento deformada | 2x RPM normalmente | Inestable | Estable | Puede desaparecer a baja velocidad. | Puede actuar como un frote. |
| Inestabilidad de la película de aceite (Cuando se produce el contacto entre el rotor y el cojinete) | Aproximadamente desde 0,43 una 0,48 RPM | Inestable | Estable | ||
| problemas de rodamientos | Varias frecuencias de rodamiento | Inestable | Estable | Cuatro frecuencias básicas. | |
| piezas resonantes | En frecuencia forzada o múltiplos | N / A | Estable | Desaparece rápidamente | Pueden ser partes adyacentes |
| Ajuste de la cubierta superior | 100 Hz radiales | Estable | Desaparece al instante | Expansión de 100 Hz eléctricos. La cubierta superior se apoya sobre el soporte del núcleo básico.. |
Caso 1 – Paw Ensayo para condiciones muslo de identificación como una causa de situaciones de excentricidad en estático motores de inducción AC
este ensayo, consumado, con una analizador de vibraciones y el motor está funcionando en condiciones normales de funcionamiento, Su objetivo es identificar la existencia de condiciones de la pierna del muslo que a menudo son la fuente de la excentricidad estática entre hierro motores de inducción AC. De este modo, la intención de eliminar el exceso de vibración que este problema puede generar, aumentando a vida útil dos componentes, la prevención de paradas no programadas debidas a un deterioro prematuro o incluso la rotura de algunos de los componentes del motor o acoplamiento unión.
Ejemplo de ensayo lleva a cabo en un motor
Un motor funcionando a 2964 rpm presentado vibraciones por encima de los límites establecidos para este tipo de equipo. Los resultados de análisis de vibraciones en motores eléctricos observaron que predominó en el espectro de la segunda frecuencia armónica de la red eléctrica (100 hz). La amplitud filtrada tuvo un valor 6,7 / s RMS mm. Esta característica, ilustrado en la figura 1, Es causada por una condición estática excentricidad en el entrehierro.
Figura 23 - espectro de frecuencias registrados durante las mediciones de rutina
Medidas después de desenroscar las patas.
Después de aflojar la primera pata motor, Observamos que no hubo cambios importantes en las características espectrales, a saber, la amplitud de la frecuencia 100 hz (Figura 2).
Figura 24 - Espectro de frecuencias registrado después de desatornillar la pata delantera de la izquierda
Los cambios más significativos en la amplitud de la segunda armónica de la frecuencia de la red eléctrica se produjeron cuando desenroscando la parte posterior de la pierna izquierda y al desenroscar la pata delantera en el lado derecho. En el último caso, la amplitud de la frecuencia se redujo a 0,2 / s RMS mm. en la figura 3, espectros de frecuencias registrados se muestran después de aflojar cada uno del motor de cuatro patas donde se puede observar cambios importantes en la amplitud de la frecuencia 100 hz.
Figura 25– Espectros de frecuencia registrados después de aflojar cada una de las cuatro patas
Con la prueba que se hace, Fue posible identificar de manera objetiva, vibrométricos que los niveles elevados en el motor de presencia se asociaron con la condición de la pierna del muslo que se originó excentricidad estática entre el hierro motor. La corrección / eliminación de la pata del muslo reducirá en gran medida los niveles de vibrométricos a la que se somete el motor, refleja en una mayor duración de los componentes.
estudio de caso 2 –análisis de vibraciones en motores eléctricos – vibraciones de resonancia Análisis en la unidad de un pulper
Un motor vertical que conduce un pulper a través de correas, tal como se muestra en la figura 4, com 600 kW de potencia y 1000 rpm, después de que el montaje y la mejora general, Se mostró altos niveles de vibración votado, Como se muestra en la Tabla I a continuación presenta.
Figura 26 – equipos esquema con la ubicación de los puntos de medición
Primeras mediciones
Los resultados del análisis de vibración en motores eléctricos, se muestra en la Tabla I, Se revela que los niveles registrados son vibrométricos, en su mayoría, considera "grave", según los criterios de evaluación adoptados. Sólo el soporte del motor, polea lateral, de acuerdo con la medición y direcciones vertical Axial, vibrométricos los niveles se consideran bueno / aceptable. datos recogidos y presentados en la Tabla I., Se revela que los niveles registrados son vibrométricos, en su mayoría, considera "grave", según los criterios de evaluación adoptados.
Tabla I
punto de medición | Los niveles de vibración globales (mm.s-1 RMS) |
punto 1V | 8,8 |
1H Point | 7,7 |
punto de 2V | 1,1 |
punto 2H | 5,5 |
2a | 2,3 |
En apoyo del motor, polea lateral, Los datos presentados anteriormente muestran una diferencia significativa entre las amplitudes vibrométricas grabadas en dos direcciones de medición radiales (Verticales y horizontales). El análisis espectral realizado mostró que los niveles de vibración están presentes en el motor, especialmente, influenciado por el rango de frecuencia de operación (1xRPMmotor= 16,65 Hz). Esta condición se ilustra en el espectro de frecuencia se muestra en la figura 5.
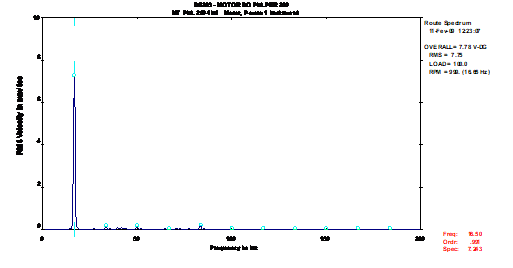
Figura 27 – vibraciones de resonancia Análisis – espectro de frecuencia recoge en el soporte del motor frente a la unidad, dirección horizontal
Dada la asimetría revelado por niveles vibrométricos observadas entre las dos direcciones de medición radiales (Verticales y horizontales), los datos presentados hasta ahora eran concluyentes en cuanto a la causa del comportamiento dinámico registrado.
Medidas en régimen transitorio
Con el fin de confirmar la existencia de condiciones de resonancia, Los ensayos se realizaron en régimen transitorio, para determinar las frecuencias naturales del sistema.
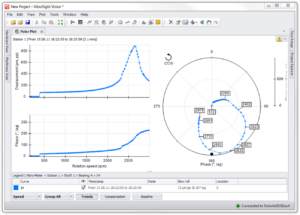
Las pruebas realizadas revelaron en la dirección horizontal a una frecuencia natural 919 CPM, debido a la variación del ángulo de fase entre alrededor de 90 919 CPM y 999 CPM. Esta característica, ilustrado en la figura 6, muestra una condición de resonancia, debido al hecho de que la frecuencia natural es cercana a la frecuencia de funcionamiento del motor (1000 CPM).
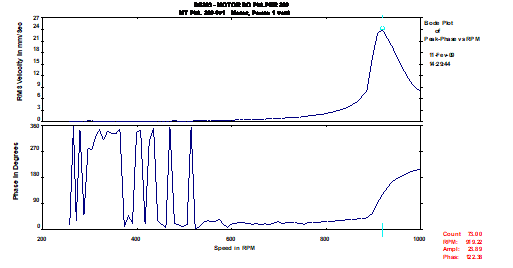
Figura 28 – vibraciones de resonancia Análisis – diagrama de Bode tomada en la dirección horizontal
Recomendaciones hechas
En función de los datos recogidos, Se recomendó rectificación base de soporte del motor y los raíles de deslizamiento de las cintas.
Medidas después de la reparación
Después de la rectificación de las bases y la reconstrucción de la masiva, Se llevó a cabo una nueva medición, cuyos valores se muestran en la Tabla II.
Tabla II
punto de medición | Los niveles de vibración globales (/ s RMS mm) |
punto 1V | 1,6 |
1H Point | 2,1 |
punto de 2V | 0,3 |
punto 2H | 1,5 |
2a | 0,4 |
La comparación de los valores que se muestran en las Tablas I y II, Ha habido una mejora significativa en los niveles de vibración. El análisis espectral realizado mostró que la mejora es, especialmente, debido a la reducción de la amplitud de la frecuencia de funcionamiento del motor (16,59 hz), Como puede verse en el espectro mostrado en la figura 7.
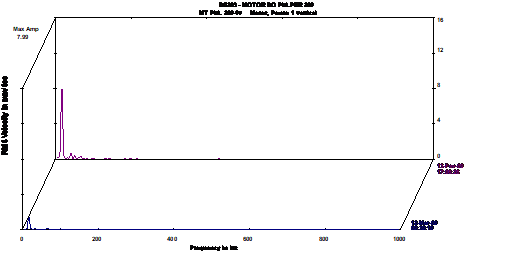
Figura 29 – vibraciones de resonancia Análisis – Spectra de frecuencias recogidos en el punto 1 Vertical, antes y después de la intervención en toda la base de apoyo
Con el fin de justificar la mejora, Dos pruebas se realizaron en régimen transitorio (en la dirección vertical y la dirección horizontal de acuerdo con), para determinar las frecuencias naturales del sistema (Figura 8 mi 9).
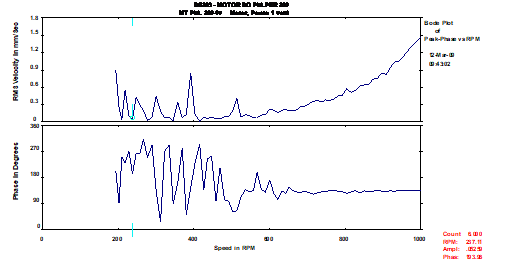
Figura 30 – vibraciones de resonancia Análisis – diagrama de Bode tomada en la dirección vertical
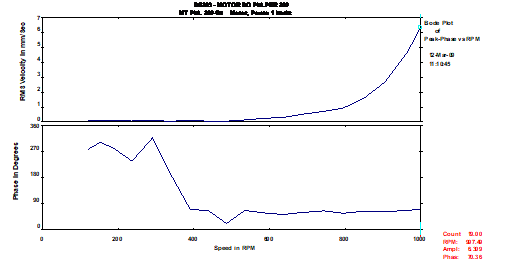
Figura 31 – vibraciones de resonancia Análisis – diagrama de Bode tomada en la dirección horizontal
-Conclusão Análisis vibraciones de resonancia
La inspección realizada concluyó que la causa de los altos niveles en presencia vibrométricos la máquina se asoció con una condición de resonancia, causado por la proximidad de la frecuencia natural del sistema y la frecuencia de funcionamiento del motor (1xRPM).
Como se encuentra en este caso, La RM es una de las causas que pueden conducir a altas amplitudes 1xRPM. Pero no sólo: otras anomalías / daños no sólo el desequilibrio, puede dar una mayor amplitud 1xRPM, tan seguramente seremos capaces de abordar en futuras ediciones de este boletín.
estudio de caso 3 – vibraciones de resonancia Análisis en un motor eléctrico
Estamos muy a menudo se nos pregunta acerca de las causas que están detrás de un comportamiento atípico de las máquinas rotativas. hoy, con la "presión" para reducir los costos de energía, Es bastante a menudo nos encontramos motores accionados con convertidores de frecuencia. Esto puede trivialización, en algunas condiciones, causar ciertos problemas en el equipo. Uno de los problemas más comunes, de otra, es que estas máquinas que operaban con valores bajos de vibración (sin variador), ir a vibrar más a ciertas velocidades (con variación de velocidad). Los datos que siguen se presentan a continuación, Ellos se recogieron en una bomba idéntica a la mostrada en la figura 10.
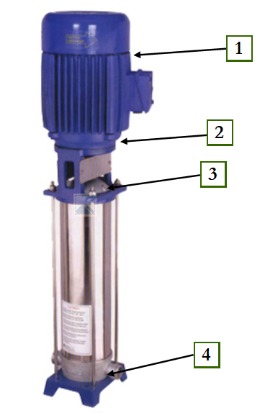
Figura 32 —Fotografía del equipo con la identificación de los puntos de medición.
mediciones iniciales
El análisis de los valores presentados en la Tabla III, Hemos encontrado que los valores de vibración registrados en la máquina para acelerar 1121 rpm, Ellos son claramente superiores a los valores recogidos cuando el motor estaba a la máxima velocidad (1479 rpm).
Tabla III
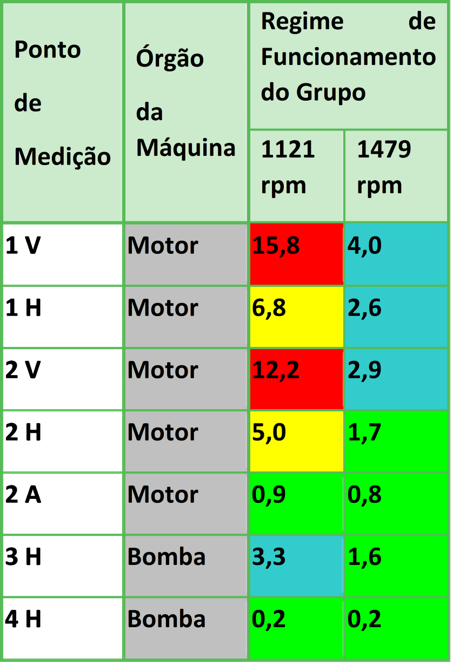
tan, fácilmente concluir que la velocidad más lenta (1121 rpm) Los niveles son más altos vibrométricos, en comparación con valores registrados a velocidades más altas (1479 rpm). Este comportamiento puede considerarse atípica porque las máquinas tienden a vibrar más, como la velocidad de rotación es mayor.
El análisis espectral realizado a los elementos recogidos, reveló que la mayoría de los puntos de medición, la gravedad grabado a una velocidad de vibrométrica 1121 rpm era, especialmente, debido a la gama de frecuencias de funcionamiento del grupo (18,68 hz). Esta característica, ilustrado en la figura 11, desequilibrio surge normalmente asociada con.
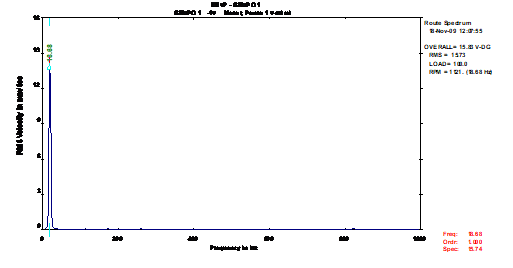
Figura 33 – vibraciones de resonancia Análisis – Espectro de frecuencia recoge en el punto 1 Vertical
sin embargo, el análisis de las figuras en detalle podemos ver una diferencia significativa en los valores, entre las dos direcciones de medición (V- vertical e horizontal H-).
esta diferencia, asociado con el hecho de que, con valores de vibración velociaumentadoras disminución (la situación opuesta a una condición de desequilibrio), Esto nos llevó a sospechar que el equipo podría ser una condición de resonancia.
más pruebas en la dirección vertical
Pruebas adicionales llevadas a cabo, a saber, la realización de impacto instrumentado martillo prueba, Ellos revelaron la presencia de una frecuencia natural 18,8 hz (1128 cpm) de acuerdo con la dirección vertical (Higo. 12).
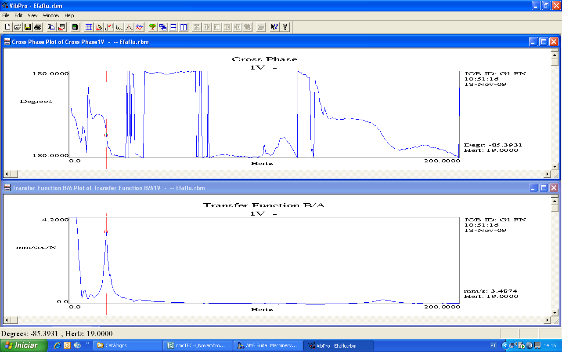
Figura 34 – análisis de vibraciones en motores eléctricos – vibraciones de resonancia Análisis – Figura transferencia y ángulo de fase función registrada durante el impacto con el martillo de ensayo instrumentado (dirección vertical)
más pruebas en la dirección horizontal
hacia Horizontal, Las mismas pruebas también revelaron una frecuencia natural 20,5 hz (1230 cpm), Como puede verse en la figura 13.
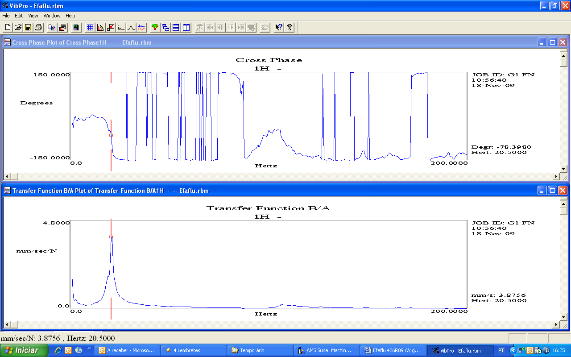
Figura 35- análisis de vibraciones en motores eléctricos – vibraciones de resonancia Análisis – Figura transferencia y ángulo de fase función registrada durante el impacto con el martillo de ensayo instrumentado (dirección horizontal)
Junto a estas frecuencias, también confirma una gama de ángulo de fase de aproximadamente 90 (condición de resonancia característica).
Consideraciones sobre el resultado de las pruebas
Con la finalización de la prueba de impacto, Fue posible determinar las frecuencias naturales del sistema, y concluir que niveles altos vibrométricos que el equipo se presentó, cuando se ejecuta el 1112 rpm, fueron generados por una condición de resonancia de acuerdo con la dirección horizontal.
La resonancia ocurre cuando una de las frecuencias de vibración en la presencia en la máquina (menudo forzada) Se encuentra cerca de la frecuencia natural del sistema.
En otras palabras, podríamos decir que una condición de resonancia no es más que la coincidencia del encuentro entre dos frecuencias (la frecuencia natural del sistema y una de las frecuencias de vibración en la presencia en la máquina). Estas frecuencias están siempre presentes en las máquinas y sólo se convierten en un problema cuando están cerca uno del otro.
Notas sobre resonancia
También hay que señalar que, a menudo, antes de caracterizar estos fenómenos de resonancia, máximos responsables de los equipos tratar de minimizar los niveles de vibración, haciendo equilibragens sucesivas la junta rotativa, y / o la alineación de los diferentes controles, en su caso.
Estos intentos por lo general no tienen ningún efecto, ya que la condición de equilibrio o alineación no son la raíz del problema. Dependiendo de las características tales como el factor de amplificación y el sistema de amortiguación, las acciones mencionadas anteriormente pueden reducir los niveles en los vibrométricos presencia, pero no lo suficiente para que la máquina puede funcionar durante largos períodos, sin se ve afectada su confiabilidad. De facto, estas acciones están tratando de cambiar la magnitud de la fuerza de excitación, no eliminando la condición de resonancia.
Conclusión vibraciones de resonancia Análisis
Para la mayoría de los constructores / instaladores de equipos, los problemas asociados con las condiciones de resonancia son difíciles de resolver, debido al hecho, a veces, no son conscientes de la razón real de la presencia de los altos niveles vibrométricos en la máquina. Se caracteriza esta condición, a veces, la resolución del problema es relativamente sencillo.
Caso 4 – Análisis de vibraciones en motores eléctricos. – Barras partidas no rotor
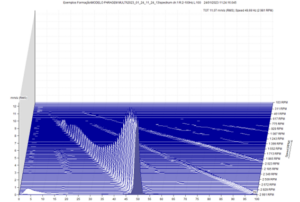
A continuación puedes ver la evolución del espectro de frecuencias entre 1999 mi 2001. Los operadores de la máquina informaron un ruido anormal.
En los sucesivos espectros se pudo observar:
- El crecimiento del componente la velocidad de rotación.;
- El crecimiento de armónicos de origen eléctrico. (nx50Hz);
- La aparición de bandas laterales. 2 x la frecuencia de deslizamiento.
El crecimiento del componente de la velocidad de rotación se debió al golpe con las bandas laterales al doble de la frecuencia de planeo..
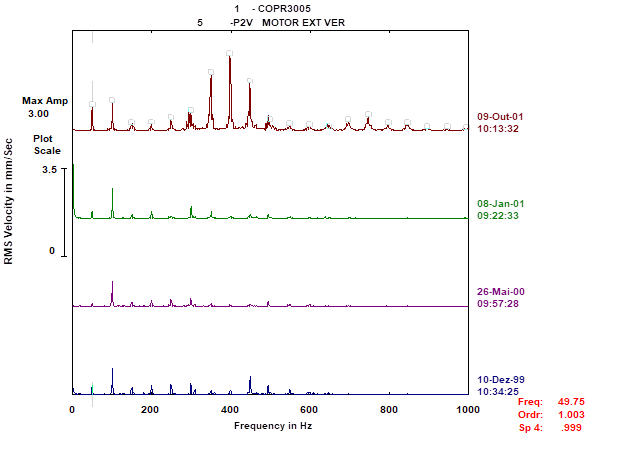
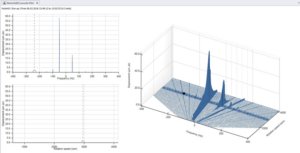
Figura 36 – Evolución del espectro de frecuencias entre 1999 mi 2001
Se podrían ver oscilaciones de amplitud de los armónicos de la velocidad de rotación y 50 hz. Tenga en cuenta que los dos espectros se midieron con media hora de diferencia durante el calentamiento del motor..
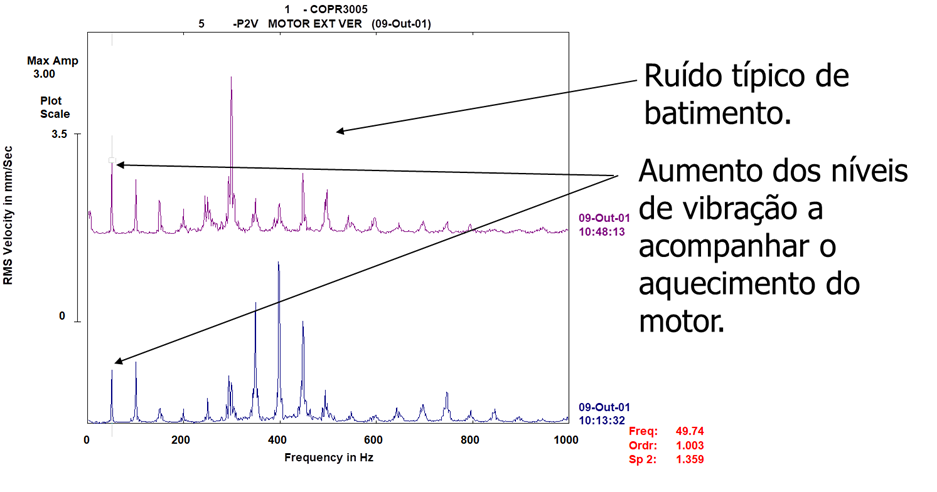
Figura 37 – Oscilaciones de amplitud de los armónicos de velocidad de rotación y 50 hz
El golpeteo es causado por la proximidad del segundo armónico de la velocidad de rotación con el segundo armónico de la frecuencia de la red. (100 hz) y bandas laterales
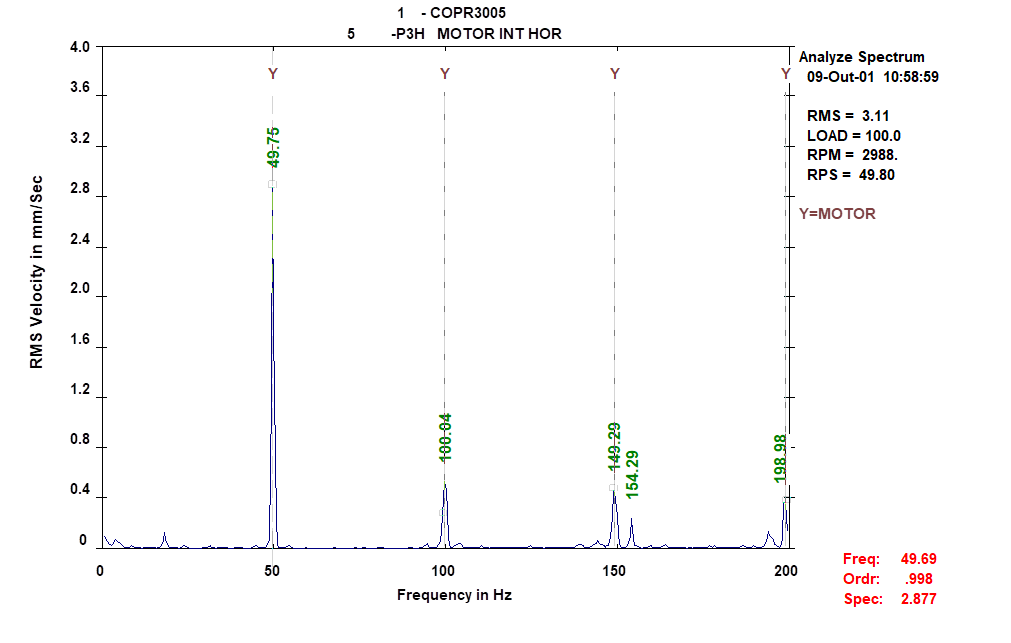
Figura 38 – espectro hasta 200 hz
En el momento de las mediciones, la frecuencia de deslizamiento era de 0,52 Hz.
En el espectro de alta resolución que se muestra a continuación, se pueden ver las bandas laterales. 2 x la frecuencia de deslizamiento (0,52 hz) en torno de 50 hz.
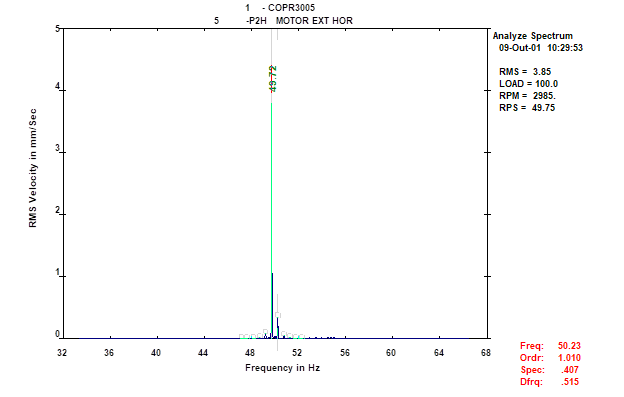
Figura 39 – Zoom a velocidad de rotación.
El diagnóstico emitido fue que había un problema con barras rotas en el rotor y el motor fue enviado a revisión..